Microprocesador 8085
- Componentes
- Arquitectura
- Set de
Instrucciones - Diseño básico
del sistema para el microprocesador 8085
El siguiente microprocesador
fue creado por la empresa Intel
en 1977. La alimentación es única: requiere
sólo +5V. Esto se debe a la nueva tecnología utilizada
para la fabricación llamada HMOS (High performance
N-channel MOS) que además permite una mayor integración, llegando a la VLSI (Very Large
Scale of Integration o muy alta escala de
integración) con más de diez mil transistores (el
8085 no es VLSI, pero sí el 8088, como se verá más
adelante).
Tiene incorporado el generador de pulsos de reloj con lo
que sólo hace falta un cristal de cuarzo y un par de
capacitores
externos (para el 8080
se necesitaba el circuito integrado auxiliar que lleva el
código
8224).
Además está mejorado en lo que se refiere
a las interrupciones. Incluye las 74
instrucciones del 8080 y posee dos adicionales
(RIM y
SIM) referidas a este sistema de
interrupciones y a la entrada y salida serie.
El bus de datos está
multiplexado con los ocho bits menos significativos del bus de
direcciones (utiliza los mismos pines para ambos buses), con lo
que permite tener más pines libres para el bus de control del
microprocesador (el 8080
necesitaba un integrado especial, el 8228, para generar el
bus de control). Intel produjo ROMs, RAMs y chips de soporte que
tienen también el bus multiplexado de la misma manera que
el microprocesador. Todos estos integrados forman la familia
MCS-85.
Debido a la gran densidad de
integración comparado con el 8080, se utilizó mucho este
microprocesador en aplicaciones industriales. Sin embargo, para
aplicaciones de computación de uso general, se
extendió más el uso del microprocesador Z-80 como
se indicó en el apartado referente al 8080.
Interrupciones
El microprocesador
8085 posee un complejo y completo sistema de interrupciones.
Esta uP posee cinco terminales destinados al tratamiento de
interrupciones. Recordemos que una interrupción es un
artificio hardware/software por el cual es
posible detener el programa en curso
para que, cuando se produzca un evento predeterminado,
después de concluir la instrucción que está
ejecutando, efectúe un salto a una determinada subrutina
en donde se efectuará el tratamiento de la
interrupción; una vez acabado éste, el uP
continúa con la instrucción siguiente del programa
principal. Así pues, el 8085 dispone de tres formas
diferentes de tratar las interrupciones que le llegan por los
citados cinco terminales. Los nombres de estos cinco terminales
son:
INTR (Interrupt Request): Por esta entrada
se introduce una interrupción que es aceptada o no
según haya sido previamente indicado por las instrucciones
EI (Permitir interrupciones) o DI (No permitir
interrupciones). Cuando una interrupción es permitida y
ésta se ha producido, la CPU busca una
instrucción RST (de un sólo byte), que es
presentada por el bus de datos por el periférico que
interrumpe. Este byte tiene el formato binario 11 XXX 111. La
subrutina se ubicará en la dirección 00 XXX 000.
RST 5.5, RST 6.5 y RST 7.5: Los
terminales de RST 5.5 y RST 6.5 detectan la
interrupción sólo si la señal que se les
aplica es un uno lógico o nivel alto de una cierta
duración, lo mismo que la entrada anterior INTR; sin
embargo, la entrada de interrupción correspondiente al
terminal RST 7.5 se excita por flanco ascendente, es
decir, por una transición de cero a uno. Esta
transición se memoriza en un biestable en el interior del
uP.
Estas interrupciones se pueden habilitar o deshabilitar
mediante las instrucciones EI y DI, como en el caso
de INTR; pero además son enmascarables por software
mediante la instrucción SIM (Set Interrupt Mask). Es posible leer
tanto el estado de
la máscara como las interrupciones que se han producido y
aún no se atendieron mediante la instrucción
RIM. TRAP: Es una
interrupción no enmascarable que es activada cuando el
terminal del mismo nombre se lleva a nivel lógico uno.
Esta interrupción es la de más alta prioridad, por
lo que puede ser usada para tratar los acontecimientos más
relevantes, tales como errores, fallos de alimentación,
etc.

Control de entrada/salida serie
Este microprocesador posee dos terminales denominados
SID (Serial Input Data) y SOD (Serial Output Data).
Estos terminales se pueden usar con propósitos generales.
Por ejemplo el terminal SID se puede conectar a un
interruptor y el SOD a un LED (a través de una
compuerta inversora externa). Para leer el estado del
terminal SID se ejecuta la instrucción
RIM, con lo que se puede leer
en el bit 7 del acumulador el estado de dicho
terminal.
Para enviar un dato por el terminal SOD se
ejecuta la instrucción SIM, donde el bit 7 del acumulador debe
tener el valor a poner
en el terminal, y el bit 6 debe estar a uno.
Terminales (pinout) del 8085

Este microprocesador estaba encapsulado en el formato
DIP (Dual Inline Package) de 40 patas (veinte de
cada lado). La distancia entre las patas es de 0,1 pulgadas (2,54
milímetros), mientras que la distancia entre patas
enfrentadas es de 0,6 pulgadas (15,32
milímetros).
Nótese en el gráfico el semicírculo
que identifica la posición de la pata 1. Esto sirve para
no insertar el chip al revés en el circuito
impreso.
Las funciones de las
40 patas con las que se conecta el 8085 con el exterior son las
siguientes:



Conjunto de Instrucciones

Explicación de cada
instrucción
Cuando me refiero a los registros "r" (ya
sea r1,r2 o simplemente r) estoy hablando de cualquier registro propio
del 8085, A(Acumulador), o los registros B,C,D,E,H,L de 8 bits
respectivamente. Estos registros se pueden agrupar por parejas
BC,DE,HL (rp) y así formar registros de 16 bits para
direccionar una posición de memoria
directamente(16 BITS), siendo el par HL el mas importante por
tener instrucciones que trabajan directamente con el.


Todas las anteriores:


BYTE= VALOR ENTRE 0 Y FF (0 Y 255 EN DECIMAL)
DOBLE BYTE= DOS BYTES PARA FORMAR 16 BITS
DIRECCION = 16 BITS o 2 BYTES
**Instrucciones Aritmético
lógicas:
instrucción código
explicación
ADD r 10000RRR Suma al acumulador el registro r y el
Resultado queda en el acumulador.
ADD M 10000110 Suma al acumulador el contenido de la
posición apuntada por HL y resultado en
acumulador.
ADI 11000110 Suma al acumulador el 2º byte de la
Instrucción y resultado en acumulador.
ADC r 10001RRR Suma al acumulador el registro r y el
Carry, resultado en acumulador.
ADC M 10001110 Suma a acumulador el contenido de la
Posición apuntada por HL y el carry,
result. en acumulador.
ACI 11001110 Suma al acumulador el 2º byte de la
Instrucción y el carry y resultado en
acumulador.
SUB r 10010RRR Resta al acumulador el contenido del
Registro r y lo deja en el acumulador.
SUB M 10010110 Resta al acumulador el contenido de la
Posición que apunta HL y resultado al
acumulador.
SUI 11010110 Resta al acumulador el 2º byte de
la
instrucción.
SBB r 10011RRR Resta al acumulador el registro r + el
carry.
SBB M 10011110 Resta al acumulador el contenido de la
Posición que apunta HL.
SBI 11011110 Resta al acumulador el 2º byte + el
carry.
INR r 00RRR100 Incrementa en 1 el registro
r.(Z;S;P;AC)
INR M 00110100 Incrementa en 1 el contenido de la
Posición que apunta HL (Z;S;P;AC)
DCR r 00RRR101 Decrementa en 1 el registro r
(Z;S;P;AC)
DCR M 00110101 Decrementa en 1 el contenido de la
Posición que apunta HL (Z;S;P;AC)
INX rp 00RR0011 Incrementa en 1 el par rp de
registros.BC,DE,HL
DCX rp 00RR1011 Decrementa en 1 el par rp de
registros.BC,DE,HL
DAD rp 00RR1001 Suma a HL el par de registros rp (CY a
veces).
DAA 00100111 Los 8 bits del acumulador se ajusta a
BCD=decimal.(flags)

ENTRE PARENTESIS() FLAGS AFECTADOS POR LA
INSTRUCCION.
Todas las anteriores:
Instrucción código
(Hex) instrucción código (Hex)
ADD A 87 ADC A 8F
ADD B 80 ADC B 88
ADD C 81 ADC C 89
ADD D 82 ADC D 8A
ADD E 83 ADC E 8B
ADD H 84 ADC H 8C
ADD L 85 ADC L 8D
ADD M 86 ADC M 8E
SUB A 97 SBB A 9F
SUB B 90 SBB B 98
SUB C 91 SBB C 99
SUB D 92 SBB D 9A
SUB E 93 SBB E 9B
SUB H 94 SBB H 9C
SUB L 95 SBB L 9D
SUB M 96 SBB M 9E
INR A 3C DCR A 3D
INR B 04 DCR B 05
INR C 0C DCR C 0D
INR D 14 DCR C 15
INR E 1C DCR D 1D
INR H 24 DCR H 25
INR L 2C DCR L 2D
INR M 34 DCR M 35
INX B 03 DCX B 0B
INX D 13 DCX D 1B
INX H 23 DCX H 2B
INX SP 33 DCX SP 3B(SP=STACK POINTER)
ADI BYTE C6 DAD B D9
ACI BYTE CE DAD D 19
SUI BYTE D6 DAD H 29
SBI BYTE DE DAD SP 39
DAA 27
**Intrucciones lógicas:
Instrucción código Explicación
ANA r 10100RRR AND entre el acumulador y el registro
r (flags, CY=0,AC=1)
ANA M 10100110 AND entre el acumulador y el
contenido
De la posición apuntada por HL (flags
Ídem)
ANI 11100110 AND entre el acumulador y el 2º byte
de La instrucción (flags ídem)
XRA r 10101RRR OR Exclusiva entre el acumulador y el
registro r (flags,CY y AC=0)
XRA M 10110110 OR Exclusiva entre el acumulador y el
contenido de la posición de HL(flags
ídem)
XRI 11101110 OR Exclusiva entre el acumulador y el
2º Byte de la instrucción(flags
ídem)
ORA r 10110RRR OR entre el acumulador y el registro
r(flags ídem)
ORA M 10110110 OR entre el acumulador y el contenido de
la posición apuntada por HL(flags
ídem)
ORI 11110110 OR entre acumulador y 2º byte de la
instrucción(ídem)
CMP r 10111RRR Compara el acumulador con el registro r
no laterando el contenido del
acumulador(si A=1 Z=1,si A<r CY=1,flags)
CMP M 10111110 Compara el acumulador con el contenido
de la posición apuntada por HL (flags
ídem)
CPI 11111110 Compara el acumulador con el 2º byte
de la instruc.(ídem)
RLC 00000111 Rotación del contenido del
acumulador un lugar a la izquierda(flags, CY y bit
0=
valor bit 7 del acumulador)
RRC 00001111 Rotación del contenido del
acumulador un lugar a la derecha(flags, CY y bit 7=
bit 0 del acumulador)
RAL 00010111 Rotación del acumulador un lugar a
la izquierda intercalando el CY (CY)
RAR 00011111 iden anterior pero a la derecha
(CY)
CMA 00101111 Complementa el contenido edl acumulador
bit a bit
CMC 00111111 Complementa el contenido del carry
CY(CY)
STC 00110111 Fija CY a 1 (CY)
todas ellas:
instrucción código instrucción código
ANA A A7 XRA A AF
ANA B A0 XRA B A8
ANA C A1 XRA C A9
ANA D A2 XRA D AA
ANA E A3 XRA E AB
ANA H A4 XRA H AC
ANA L A5 XRA L AD
ANA M A6 XRA M AE
ORA A B7 CMP A BF
ORA B B0 CMP B B8
ORA C B1 CMP C B9
ORA D B2 CMP D BA
ORA E B3 CMP E BB
ORA H B4 CMP H BC
ORA L B5 CMP L BD
ORA M B6 CMP M BE
CMA 2F RLC 07
STC 37 RRC 0F
CMC 3F RAL 17
RAR 1F
ANI BYTE E6
XRI BYTE EE
ORI BYTE F6
CPI BYTE FE
**Instrucciones de bifurcación:
instrucción código Explicación
JMP 11000011 Salto a la posición indicada por el
2º y 3º byte de la instrucción, 2º
byte=parte
baja,3º=alta
instrucción Flags código Explicación
JZ Z 11FF1010 Salto a la posición indicada en
el 2 y 3º byte de
JC CY la instrucción si el flag (FF) tiene
valor 1
JPE P
JM S
JNZ Z 11FF0010 ídem si el valor del Flag es
cero
JNC CY
JPO P
JP S
PCHL 11101001 Salto a la posición direccionada
por HL.
todas ellas:
instrucción código instrucción código
JMP dir. C3 JPO dir. E2
JNZ dir. C2 JPE dir. EA
jz dir. CA JP dir. F2
JNC dir. D2 JM dir. FA
JC dir. DA PCHL E9
**Instrucciones de salto y retorno a
subrutinas:
instrucción
flags código Explicación
CALL 11001101 Salto a la posición direccionada
por el 2º y 3º byte de la
instrucción.Guarda en el STACK el contenido
de P.C.(Contador de programa).
CZ Z 11FF1100 Salto a la posición direccionada
por el 2º y 3º
CC CY byte de la instrucción si el flag
indicado es uno.
CPE P Guarda el P.C. en el stack.
CM S
CNZ Z 11FF1100 ídem anterior pero si el Flag es
cero.
CNC CY Guarda el P.C. en el STACK.
CPO P
CP S
RET 11001001 Retorno a la ultima dirección
Almacenada en el STACK.
RZ Z 11FF1000 Retorno a la ultima dirección
almacenada
RC CY en el STACK solo si el Flag indicado vale
1.
RPE P
RM S
RNZ Z 11FF0000 ídem caso anterior pero si el
Flag vale 0.
RNC CY
RPO P
RP S
todas ellas:
instrucción código instrucción código
CALL dir. CD RET C9
CNZ dir. C4 RNZ C0
CZ dir. CC RZ C8
CNC dir. D4 RNC D0
CC dir. DC RC D8
CPO dir. E4 RPO E0
CPE dir. EC RPE E8
CP dir. F4 RP F0
CM dir. FC RM F8
**Otras instrucciones:
instrucción código Explicación
PUSH rp 11RR0101 Guarda el par de registros rp en el
Stack.
PUSH PSW 11110101 Guarda el contenido del acumulador y
el registro de Flags en el Stack.
POP rp 11RR0001 Carga el el par de registros rp el
contenido de las dos ultimas posiciones
del Stack
POP PSW 11110001 Carga el registro de Flags y el
Acumulador con las dos ultimas
posiciones del Stack.
XTHL 11100011 Intercambio del contenido de las
Posiciones direccionadas por el Stack
por el contenido de los registros H y L.
SPHL 11111001 Traslada el contenido del par HL al
Puntero del Stack. Debe ejecutarse al
iniciar el sistema para ubicar el Stack en la zona
elegida de la memo ria.
IN port 11011011 Carga el acumulador con el contenido
del canal I/O direccionado por el 2º byte de
la instrucción.
OUT port 11010011 Carga el canal I/O direccionado por el
2º byte de la instrucción con el
acumulador.
EI 11111011 Habilita las interrupciones (no afecta a
la interrupcion TRAP)
DI 11110011 Deshabilita las interrupciones (
no afecta a TRAP)
HLT 01110110 Detencion y entrada de la cpu hasta que
se realice un Reset, una interrupcion
valida o un HOLD.
NOP 00000000 No opera, solo sirve para perder tiempo.
SIM 00110000 Fija el registro de interrupciones y la
linea SOD con el valor del acumulador.
Bit 7 del acumulador= sale por linea SOD.
Bit 6 " " = a 1 habilita la linea SOD.
Bit 5 no se usa.
Bit 4 " " = a 1 borra la bascula RST 7,5
Bit 3 = a 1 permite modificar este
registro.
Bit 2 = a 1 prohibe la interrupcion 7,5
Bit 1 = a 1 prohibe la " 6,5
Bit 0 = a 1 prohibe la " 5,5
RIM 00100000 Lee el estado de la línea SID y el
estado de las interrupciones cargándolo
en el acumulador:
Bit 7 del acumulador con: Lo que tenga la
línea SID,
Bit 6 " : a 1 indica que la interrupción 7,5
esta solicitada por ejecutar.
Bit 5 " : iden anterior pero con la 6,5
Bit 4 " : ídem anterior pero con la
5,5
Bit 3 " : a 1 indica que las interrupciones INTR
han sido habilitadas. cion EI. Bit 2 " : Estado de
la interrupción 7,5
Bit 1 " : Estado de la interrupción
6,5
Bit 0 " : Estado de la interrupción
5,5
RST 11AAA111 Guarda el P.C. en el Stack y lo
carga
con la dir:00000000AAA000
Cuando se produce la interrupción INTR,
después de aceptarla con INTA hay que
introducir por el bus de datos el
código
AAA que será axial:
AAA RST dirección de salto(en HEX.)
000 0 0000
001 1 0008
010 2 0010
011 3 0018
100 4 0020
101 5 0028
110 6 0030
111 7 0038
todas las que quedaban:
instrucción código instrucción código
PUSH B C5 POP B C1
PUSH D D5 POP D D1
PUSH H E5 POP H E1
PUSH PSW F5 POP PSW F1
XTHL E3 SPHL F9
OUT byte D3 IN byte DB
DI F3 EI FB
NOP D0 HLT 78
RIM 20 SIM 30
RST 0 C7 RST 4 E7
RST 1 CF RST 5 EF
RST 2 D7 RST 6 F7
RST 3 DF RST 7 FF
***Y POR ULTIMO LOS FLAGS:
Los flag (bandera en español)
es un registro interno de la cpu que indica el estado de una
operación después de haberla realizado (más
o menos), estos son controlados por la ALU(una cosa interna que
hace todas las operaciones
aritméticas y lógicas). Pero veamos que son cada
uno:
Flags Explicación
S Cuando un resultado ha sido negativo se pone a
1
Z Cuando una operación ha sido cero este se pone
a 1
P Indica la paridad de una operación, si es par
P=1
CY Se pone a 1 cuando se produce un acarreo en una
operación de 8 bits
**P.D. :Siempre el primer byte que se carga (por ejemplo
en la instrucción JMP dir.) es el mas bajo y el segundo el
mas alto, por lo tanto al lado de las instrucciones que llevan
2º y 3º byte estos indicaran la dirección pero
al revés.
Diseño
básico del sistema para el microprocesador
8085
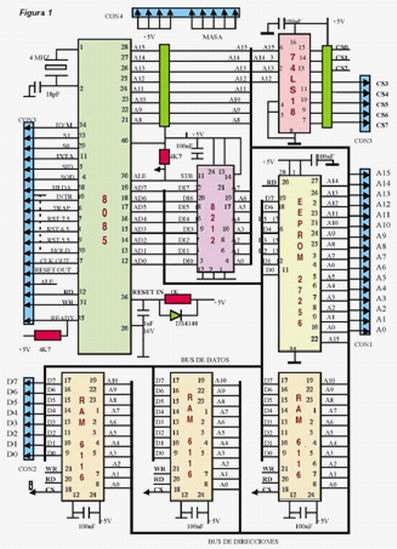
La "tarjeta" que posee el sistema básico para
hacer funcionar al microprocesador 8085 se muestra en la
figura 1.
En ella podemos ver cómo la conexión de la memoria
EEPROM se realiza del mismo modo que se ha indicado en la
edición
anterior.
El banco de memorias
RAM estará
constituido en este caso por tres unidades tipo 6116, con
idéntico modo de conexión en todas sus
líneas a excepción de las líneas de selección
de chip, que en este caso serán las CS0, CS1 y CS2
procedentes del decodificador 74LS138 (vea Saber 195).
En lo que se refiere a la conexión del 8212, vemos que
nada varía respecto a lo que el lector conoce,
únicamente debemos mencionar la colocación de una
resistencia de
4k7 de "pull-up" a +5V en la señal ALE con el objeto de
reafirmar los niveles de tensión en esta salida del
microprocesador.
Este mismo sistema se emplea en la parte alta del bus de
direcciones en el que se sitúa un bloque de 8 resistencias
de 10 k ohm cada una conectadas a +5V.
El decodificador de direcciones 74LS138, sigue el mismo esquema
de conexión explicado oportunamente. Ahora además
se refuerzan las salidas del mismo colocando un bloque de 8
resistencias de 4k7 a +5V. Puede verso como en este caso las
salidas CS0, CS1 y CS2, tomadas de las patas 15, 14 y 13
respectivamente se emplean para direccionar las tres pastillas de
memorias RAM que hemos colocado en el sistema.
Puede verse con claridad cómo el microprocesador se sirve
de un cristal de cuarzo de 4MHz y un condensador de 18pF, que
colocados entre las patas 1 y 2 generan la oscilación que
produce la frecuencia de reloj a la que funcionará el
sistema. Es decir, se genera la "frecuencia de trabajo".
Destacamos además el circuito situado en la señal
de entrada RESET IN del microprocesador (pata 36) formado por una
resistencia de 1 k ohm en paralelo con un diodo y un condensador
electrolítico de 1 microfarario. Este circuito es el que
asegura un arranque correcto del sistema en el momento de
conexión a red iniciándose el
contador de programa en la dirección 0000H, después
de que la patilla 36 haya alcanzado el nivel lógico 1
(ALTO).
Este circuito produce un retardo en el arranque que viene dado
aproximadamente por la constante de tiempo RC
En la parte izquierda de la figura 1 puede verse que las
señales
INTR, TRAP, RST 7.5, RST 6.5, RST 5.5 y HOLD son conectadas
directamente a masa para conseguir un correcto funcionamiento del
sistema mientras no vayamos a emplearlas.
Estas conexiones deben realizarse individualmente para
cada señal y mediante puentes fácilmente
eliminables de modo que si en un momento dado, para una
determinada aplicación deseamos emplear alguna de ellas,
podamos hacerlo sin más que eliminar el puente a masa
correspondiente y tratando dicha entrada del modo
adecuado.
Además deben colocarse distribuidos sobre la
tarjeta condensadores
de desacoplo. Lo más usual es situar uno por cada circuito
integrado y deberán ir soldados mediante conexiones cortas
y a ser posible directamente sobre las patillas de
alimentación de los circuitos
integrados.
Este es un medio eficaz y sencillo para impedir la
creación de señales parásitas de alta
frecuencia que son derivadas a masa
a través del condensador. Normalmente estos condensadores
son de 100nF. Puede apreciarse también cómo la
tarjeta dispones, para su conexión a otros circuitos, de
cuatro conectores:
CON1: Constituido por 16 líneas en las cuales
podemos encontrar el bus de direcciones completo (A0, A1, A2,
…, A15).
CON2: Constituido por 8 líneas en las que podemos
encontrar el bus de datos completo (D0, D1, …, D7).
CON3: Constituido por un total de 24 líneas entre
las que encontramos el bus de control, el bloque completo de
señales de interrupción (que podremos utilizar
desde el exterior eliminando previamente los puentes a masa) y
las señales de selección de chip que se toman del
decodificador 74LS138.
CON4: Constituido por nueve líneas
divididas en dos grupos que sirven
para suministrar la alimentación a la tarjeta (+5V y
MASA).
Realizadas todas estas consideraciones, no queda
más que analizar con detenimiento, las direcciones de
memoria que ocupa cada uno de los componentes que integran esta
tarjeta y las direcciones que quedan disponibles para futuras
ampliaciones.
Como puede deducirse de la figura 1 y apoyándonos
en los valores
que adquieren las entradas A0, A1, A2 y E3 del decodificador, se
tendrá la siguiente distribución de direcciones:
EPROM 27256: Desde 0000H hasta 7FFFH
RAM 6116-1: Desde 8000H hasta 87FFH
RAM 6116-2: Desde 9000H hasta 97FFH
RAM 6116-3: Desde A000h hasta A7FFH
Al mismo tiempo, los terminales del decodificador 74LS138 que
quedan libres para añadir nuevos elementos al sistema,
responderán a las siguientes direcciones:
CS3 – B000H
CS4 – C000H
CS5 – D000H
CS6 – E000H
CS7 – F000H
Ejemplo de Programas que
realiza el microprocesador 8085
1)
;**************************************************
;* Nombre : Simulador de aut¢mata programable
*
;* Programador: Esteban Galeano *
;* Fecha: 13 octubre 1995 *
;* Ult. modif: 31 agosto 2000 *
;* Fichero: AUTOMATA.ASM *
;**************************************************
;***************************************************************
;* Se simular el funcionamiento de un
autómata programable, *
;* en cuyo interior hay un circuito MARCHA/PARO. Para
ello, *
;* seguir el siguiente funcionamiento:
*
;* *
;* Marcha Paro ³ Salida *
;*
ÄÄÄÄÄÄÄÄÄÄÄÄÄÅÄÄÄÄÄÄÄÄ
*
;* 0 0 ³ Salida *
;* 0 1 ³ 0 *
;* 1 0 ³ 1 *
;* 1 1 ³ 0 *
;* *
;* HACER *
;* programar(8255); *
;* MIENTRAS PuertoA[7]=1 HACER *
;* valor:=PuertoA[1..0]; *
;* SI *
;* valor=00b -> í *
;* valor=01b -> PuertoB[0]:=0 *
;* valor=10b -> PuertoB[0]:=1 *
;* valor=11b -> PuertoB[0]:=0 (prio PARO)
*
;* FSI *
;* FMIENTRAS *
;* MIENTRAS (cierto) *
;***************************************************************
;****************************
;* Definición de ENTORNO *
;****************************
.RADIX H ;Sistema de numeración ser
hexadecimal
;****************************
;* Definición de CONSTANTES *
;****************************
cero: .EQU 0
DirPila: .EQU 1200 ;Dirección desde donde
comenzar la PILA
ByteControl: .EQU 90 ;8255 -> A in – B out – C
out
2)
;***********************************************
;* Nombre : Espera visualizable FFFF-0000 *
;* Programador: Esteban Galeano *
;* Fecha: 11 octubre 1995 *
;* Ult. modif: 31 agosto 2000 *
;* Fichero: CONTADOR.ASM *
;***********************************************
;***************************************************************
;* Se le dar un valor num‚rico a los
registros HL y cada 1ms *
;* se decrementar su valor hasta llegar a cero,
momento en el *
;* cual, se terminar el programa y regresar
al S.O. *
;* *
;* HL:=selecci¢n *
;* HACER *
;* retardo(1ms); *
;* visualiza(HL); *
;* HL:=HL-1; *
;* MIENTRAS (HL<>0) *
;* visualiza(HL); *
;* restaurar; *
;***************************************************************
;****************************
;* Definición de ENTORNO *
;****************************
.RADIX H ;Sistema de numeración ser
hexadecimal
;****************************
;* Definición de CONSTANTES *
;****************************
cero: .EQU 0
DirPila: .EQU 1200 ;Dirección desde donde
comenzar la PILA
selección: .EQU 2000 ;Numero de veces a
decrementar
;***************************
;* Inclusión de SUBRUTINAS *
;***************************
.DATA ;Dirección inicial de las
subrutinas
.INCLUDE a:rutinas.asm ;Incluye la definición de
direcciones de rutinas del S.O.
;***************************
;* Programa PRINCIPAL *
;***************************
.CODE
.ORG 1000 ;Dirección inicial del
programa
LXI SP,DirPila ;SP:=DirPila
LXI H,seleccion ;HL:=seleccion
sigue: PUSH H ;Salvar los registros H y
L
CALL delay ;Retardo de 1ms
CALL updad ;Visualiza HL en el campo de direcciones del
®Display¯
POP H ;Recuperar los registros H y L
DCX H ;HL:=HL-1
MOV A,H ;Si (H<>0) salta
CPI cero
JNZ sigue
MOV A,L ;Si (L<>0) salta
CPI cero
JNZ sigue
;*******************************
;* Visualizar el Ultimo valor *
;*******************************
PUSH H ;Salvar los registros H y L
CALL updad ;Visualiza HL en el campo de direcciones del
®Display¯
POP H ;Recuperar los registros H y L
RST 1
.END
Muebles de Oficina, C.A.
"MOCA"