- Introducción
- Historia
- Los
robots en la industria: evolución y
perspectivas - Mirando hacia el futuro
- Eventos, fechas y datos
curiosos - Bibliografía
Introducción
Qué es un
robot
Un robot es una máquina controlada
por ordenador y programada para moverse, manipular objetos y
realizar trabajos a la vez que interacciona con su entorno. Su
objetivo principal es el de sustituir al ser humano en tareas
repetitivas, difíciles, desagradables e incluso peligrosas
de una forma más segura, rápida y precisa. Algunas
definiciones aceptadas son las siguientes:
"Dispositivo multifuncional reprogramable
diseñado para manipular y/o transportar material a
través de movimientos programados para la
realización de tareas variadas." (Robot Institute of
America, 1979).
"Dispositivo automático que realiza
funciones normalmente adscritas a humanos o máquina con
forma humana." (Webster Dictionary).
Esta última definición, sin
embargo, no es la más acertada, ya que un robot no tiene
porqué tener forma humana. Un lavavajillas es un robot,
así como los satélites artificiales, el "tractor"
lunar soviético Lunakhod o la sonda exploradora de la NASA
Mars Pathfinder. Toda una refinería petrolífera
controlada por computador también puede ser considerada un
robot.
Los robots exhiben tres elementos claves
según la definición adoptada:
Programabilidad, lo que significa
disponer de capacidades computacionales y de manipulación
de símbolos (el robot es un computador).
Capacidad mecánica, que lo
capacita para realizar acciones en su entorno y no ser un mero
procesador de datos (el robot es una máquina).
Flexibilidad, puesto que el robot
puede operar según un amplio rango de programas y
manipular material de formas distintas.
Con todo, se puede considerar un robot como
una máquina complementada con un computador o como un
computador con dispositivos de entrada y salida
sofisticados.
La idea más ampliamente aceptada de
robot está asociada a la existencia de un dispositivo de
control digital que, mediante la ejecución de un programa
almacenado en memoria, va dirigiendo los movimientos de un brazo
o sistema mecánico. El cambio de tarea a realizar se
verifica ordenando el cambio de programa.
Origen de la palabra
robot
El término procede de la palabra
checa robota, que significa 'trabajo obligatorio'; fue
empleado por primera vez en la obra teatral R.U.R. (Robots
Universales de Rossum), estrenada en Enero de 1921 en Praga por
el novelista y dramaturgo checo Karel Capek. La obra fue
un éxito inmediato y pronto se estrenó en multitud
de teatros por toda Europa y Estados Unidos. En ella, el gerente
de una fábrica construía unos seres al absoluto
servicio del hombre, que realizaban todas las tareas mientras los
humanos se dedicaban al ocio permanente. Cuando el gerente de la
fábrica decide construir robots más perfectos que
experimentaran felicidad y dolor, todo cambia. Los robots se
sublevan contra los hombres y destruyen al género
humano.
Áreas de
aplicación
El término Robótica se
refiere a la ciencia o arte relacionada con la inteligencia
artificial (para razonar) y con la ingeniería
mecánica (para realizar acciones físicas sugeridas
por el razonamiento). Este término fue acuñado
en 1942 por el bioquímico, escritor y divulgador
científico norteamericano de origen ruso Isaac
Asimov en su novela corta Runaround.
La nueva capacidad de las máquinas
para comunicar y controlar procesos, dirigir operaciones y
cumplir las órdenes, e incluso aprender, llevó al
desarrollo de una nueva ciencia: la Cibernética,
palabra que deriva del vocablo griego Kybernetes, que
significa "timonel". Fundada en la década de 1940 por el
matemático norteamericano Norbert Wiener, es la
ciencia que estudia la comunicación entre el hombre y la
máquina, y entre las propias máquinas. De la mano
de la Cibernética se desarrolló la
Biónica, ciencia que estudia todos los aspectos
relativos a la simulación de actividades humanas y
animales por medio de máquinas.
El área de conocimiento en la que se
enmarca la Robótica es la Automática,
definida por la Real Academia de las Ciencias como la
disciplina que se ocupa de los métodos y
procedimientos cuya finalidad es la sustitución del
operador humano por un operador artificial en la ejecución
de una tarea física y mental, previamente programada.
A partir de esta definición, en la Automática se
pueden diferenciar dos componentes claros:
Una Unidad de Control que gobierna
las acciones a realizar. Este gobierno debe cumplir ciertos
criterios u objetivos del control como la estabilización
ante perturbaciones, o la evolución temporal y el
comportamiento dinámico óptimo respecto a
determinados parámetros de calidad. Los avances en
el campo de la inteligencia artificial permiten dotar a
estas unidades de aspectos más avanzados como la toma de
decisiones o el aprendizaje.
Un Actuador que realiza las acciones
programadas bajo la supervisión de la unidad de control.
Estos dispositivos pueden ir desde los casos más
elementales, como accionadores hidráulicos,
neumáticos o electromecánicos hasta máquinas
más complejas como manipuladores,
máquinas-herramientas y, quizás los
autómatas por excelencia, los robots.
La coordinación entre ambos
componentes mediante el intercambio de información es lo
que permite conseguir la realización correcta de las
tareas a realizar. Puesto que es posible definir la
Informática como la ciencia que estudia el
tratamiento de la información, es evidente que existe
una relación clara entre Automática e
Informática.
Historia
El concepto de máquinas
automatizadas se remonta a la antigüedad, con mitos de seres
mecánicos vivientes. Los autómatas, o
máquinas semejantes a personas, ya aparecían en los
relojes de las iglesias medievales, y los relojeros del siglo
XVIII eran famosos por sus ingeniosas criaturas
mecánicas.
El control por realimentación, el
desarrollo de herramientas especializadas y la división
del trabajo en tareas más pequeñas que pudieran
realizar obreros o máquinas fueron ingredientes esenciales
en la automatización de las fábricas en el siglo
XVIII. A medida que mejoraba la tecnología se
desarrollaron máquinas especializadas para tareas como
poner tapones a las botellas o verter caucho líquido en
moldes para neumáticos. Sin embargo, ninguna de estas
máquinas tenía la versatilidad del brazo humano, y
no podían alcanzar objetos alejados y colocarlos en la
posición deseada.
En la década de 1890 el científico
Nikola Tesla, inventor, entre muchos otros dispositivos,
de los motores de inducción, ya construía
vehículos controlados a distancia por radio. Tesla fue un
visionario que escribió sobre mecanismos inteligentes tan
capaces como los humanos.
Las máquinas más
próximas a lo que hoy en día se entiende como
robots fueron los "teleoperadores", utilizados en la industria
nuclear para la manipulación de sustancias radiactivas.
Básicamente se trataba de servomecanismos que, mediante
sistemas mecánicos, repetían las operaciones que
simultáneamente estaba realizando un operador.
Inmediatamente después de la Segunda
Guerra Mundial comienzan los primeros trabajos que llevan a los
robots industriales. A finales de los 40 se inician programas de
investigación en los laboratorios de Oak Ridge y
Argonne National Laboratories para desarrollar manipuladores
mecánicos para elementos radiactivos. Estos manipuladores
eran del tipo "maestro-esclavo", diseñados para que
reprodujeran fielmente los movimientos de brazos y manos
realizados por un operario.
El inventor estadounidense George C.
Devol desarrolló en 1954 un dispositivo de
transferencia programada articulada (según su propia
definición); un brazo primitivo que se podía
programar para realizar tareas específicas.
En 1958, Devol se unió a Joseph
F. Engelberger y, en el garaje de este último,
construyeron un robot al que llamaron Unimate. Era un
dispositivo que utilizaba un computador junto con un manipulador
que conformaban una "máquina" que podía ser
"enseñada" para la realización de tareas variadas
de forma automática. En 1962, el primer Unimate
fue instalado a modo de prueba en una planta de la General
Motors para funciones de manipulación de piezas y
ensamblaje, con lo que pasó a convertirse en el primer
robot industrial. Devol y Engelberger fundarían
más tarde la primera compañía dedicada
expresamente a fabricar robots, Unimation, Inc.,
abreviación de Universal Automation
Se puede considerar este punto como el
inicio de la era de la Robótica tal como la conocemos,
mediante la utilización de los robots programados, una
nueva y potente herramienta de fabricación.
Durante la década de los 60, un
nuevo concepto surge en relación con los anteriores
avances. En vistas a una mayor flexibilidad, se hace necesaria la
realimentación sensorial. En 1962, H. A. Ernst
publica el desarrollo de una mano mecánica controlada por
computador con sensores táctiles llamada MH-1.
Este modelo evolucionó adaptándole una
cámara de televisión dentro del proyecto
MAC. También en 1962, Tomovic y
Boni desarrollan una mano con un sensor de presión
para la detección del objeto que proporcionaba una
señal de realimentación al motor.
En 1963 se introduce el robot comercial
VERSATRAN por la American Machine and Foundry
Company
(AMF). En el mismo año se
desarrollan otros brazos manipuladores como el
Roehampton y el Edinburgh.
En 1967 y 1968 Unimation recibe
sus primeros pedidos para instalar varios robots de la serie
Unimate 2000 en las cadenas de montaje de la General
Motors. Al año siguiente los robots ensamblaban todos
los coches Chevrolet Vega de esta
compañía.
En 1968 se publica el desarrollo de un computador con
"manos", "ojos" y "oídos" (manipuladores, cámaras
de TV y micrófonos) por parte de McCarthy en el
Stanford Artificial Intelligence Laboratory. En el mismo
año, Pieper estudia el problema cinemático
de un manipulador controlado por un computador. También
este año,
la compañía japonesa
Kawasaki Heavy Industries negocia con Unimation
la licencia de sus robots. Este momento marca el inicio de la
investigación y difusión de los robots industriales
en Japón.
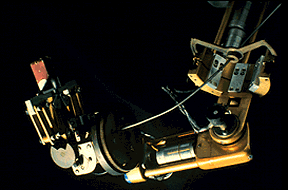
El brazo
Stanford(1969).
En 1969 se demuestran las propiedades de la
visión artificial para vehículos autoguiados en el
Stanford Research Institute. Este mismo año se
desarrollaron los brazos Boston y Stanford,
este último dotado de una cámara y controlado por
computador. Sobre el brazo Stanford se desarrolló
un experimento en el que el manipulador apilaba bloques
según determinados criterios.
Las primeras aplicaciones industriales en
Europa, aplicaciones de robots industriales en cadenas de
fabricación de automóviles, datan de los
años 1970 y 1971. En este último año,
Kahn y Roth analizan el comportamiento
dinámico y el control de un brazo manipulador.
Durante la década de los 70, la
investigación en robótica se centra en gran parte
en el uso de sensores externos para su utilización en
tareas de manipulación. Es también en estos
años cuando se consolida definitivamente la
presencia de robots en las cadenas de montaje y plantas
industriales en el ámbito mundial.
En 1972 se desarrolló en la
universidad de Nottingham, Inglaterra, el
SIRCH, un robot capaz de reconocer y orientar objetos en
dos dimensiones. Este mismo año, la empresa japonesa
Kawasaki instala su primera cadena de montaje
automatizada en Nissan, Japón, usando robots
suministrados por Unimation, Inc.
En 1973, Bolles y Paul utilizan
realimentación visual en el brazo Stanford para
el montaje de bombas de agua de automóvil. También
este mismo año, la compañía sueca
ASEA (futura ABB), lanza al mercado su familia
de robots IRB 6 e IRB 60, para funciones de
perforación de piezas.
En 1974, Nevins y sus colaboradores,
en el Draper Laboratory, investigan técnicas de
control basadas en la coordinación de fuerzas y
posiciones, y Bejczy, en el Jet Propulsion
Laboratory, desarrolla una técnica para el control de
par basada en el robot Stanford. El mismo año,
Inoue, en el Artificial Intelligence Laboratory
del MIT, desarrolla trabajos de investigación en
los que aplica la inteligencia artificial en la
realimentación de fuerzas.
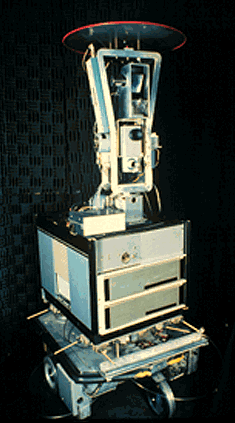
Shakey, el primer
vehículo autoguiado controlado por inteligencia artificial
(1970).
También este mismo año, la
empresa Cincinatti Milacron introduce el T3 (The
Tomorrow Tool), su primer robot industrial controlado por
computador. Este manipulador podía levantar más de
100 libras y seguir objetos móviles en una línea de
montaje.
En 1975, Will y Grossman, en
IBM, desarrollaron un manipulador controlado por
computador con sensores de contacto y fuerza para montajes
mecánicos. Este mismo año, el ingeniero
mecánico estadounidense Victor Scheinman, cuando
estudiaba la carrera en la Universidad de Stanford,
California, desarrolló un manipulador polivalente
realmente flexible conocido como Brazo Manipulador Universal
Programable (PUMA, siglas en inglés). El
PUMA era capaz de mover un objeto y colocarlo en
cualquier orientación en un lugar deseado que estuviera a
su alcance. El concepto básico multiarticulado del
PUMA es la base de la mayoría de los robots
actuales.
En 1976, estudios sobre el control
dinámico llevados a cabo en los laboratorios
Draper, Cambridge, permiten a los robots alinear piezas
con movimientos laterales y rotacionales a la vez.
En 1979 Japón introduce el robot
SCARA (Selective Compliance Assembly Robot
Arm), y la compañía italiana
DEA (Digital Electric
Automation), desarrolla el robot PRAGMA para la
General Motors.
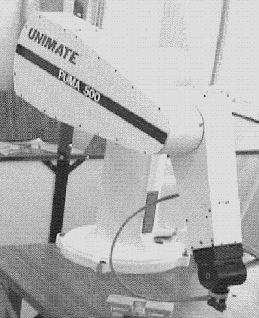
El robot PUMA.
En la década de los 80 se avanza en
las técnicas de reconocimiento de voz, detección de
objetos móviles y factores de seguridad. También se
desarrollan los primeros robots en el campo de la
rehabilitación, la seguridad, con fines militares y para
la realización de tareas peligrosas. Así por
ejemplo, en 1982, el robot Pedesco, se usa para limpiar
un derrame de combustible en una central nuclear. También
se pone un gran énfasis en los campos de visión
artificial, sensorización táctil y lenguajes de
programación. Gracias a los primeros pasos dados por
compañías como IBM o Intelledex
Corporation, que introdujo en 1984 el modelo ligero de
ensamblaje 695, basado en el microprocesador Intel 8087
y con software Robot Basic, una modificación del
Microsoft Basic, actualmente se tiende al uso de una
interfaz (el ordenador) y diversos lenguajes de
programación especialmente diseñados, que evitan el
"cuello de botella" que se producía con la
programación "clásica". Esta puede ser ahora
on-line u off-line, con interfaces
gráficas (user-friendly interfaces) que facilitan
la programación, y un soporte SW+HW que tiende a
ser cada vez más versátil.
Los robots en la
industria: evolución y perspectivas
En 1995 funcionaban unos 700.000 robots en
el mundo industrializado. Más de 500.000 se empleaban en
Japón, unos 120.000 en Europa Occidental y unos 60.000 en
Estados Unidos. Muchas aplicaciones de los robots corresponden a
tareas peligrosas o desagradables para los humanos. En los
laboratorios médicos, los robots manejan materiales que
conlleven posibles riesgos, como muestras de sangre u orina. En
otros casos, los robots se emplean en tareas repetitivas y
monótonas en las que el rendimiento de una persona
podría disminuir con el tiempo. Los robots pueden realizar
estas operaciones repetitivas de alta precisión durante 24
horas al día sin cansarse. Uno de los principales usuarios
de robots es la industria del automóvil. La empresa
General Motors utiliza aproximadamente 16.000 robots
para trabajos como soldadura por puntos, pintura, carga de
máquinas, transferencia de piezas y montaje. El montaje es
una de las aplicaciones industriales de la robótica que
más está creciendo. Exige una mayor
precisión que la soldadura o la pintura y emplea sistemas
de sensores de bajo coste y computadoras potentes y baratas. Los
robots se usan por ejemplo en el montaje de aparatos
electrónicos, para montar microchips en placas de
circuito.
Las actividades que entrañan gran
peligro para las personas, como la localización de barcos
hundidos, la búsqueda de depósitos minerales
submarinos o la exploración de volcanes activos, son
especialmente apropiadas para emplear robots. Los robots
también pueden explorar planetas distantes. La sonda
espacial no tripulada Galileo, de la NASA, viajó
a Júpiter en 1996 y realizó tareas como la
detección del contenido químico de la
atmósfera joviana.
Ya se emplean robots para ayudar a los
cirujanos a instalar caderas artificiales, y ciertos robots
especializados de altísima precisión pueden ayudar
en operaciones quirúrgicas delicadas en los ojos. La
investigación en telecirugía emplea robots
controlados de forma remota por cirujanos expertos; estos robots
podrían algún día efectuar operaciones en
campos de batalla distantes.
Todo este avance se ha producido en unos 30
años. Hasta la mitad de los años 70 no comienza a
ser la
robótica lo que puede considerarse
como el inicio de una industria. Entre 1975 y 1977 se estima que
las ventas de Unimation (prácticamente la
única empresa existente) se multiplicaron por 2.5. A
partir de ahí, seis empresas más, bastante
significativas (Cincinatti Milacron, Asea, etc.),
deciden entrar en el mercado de la robótica, comenzando
también la industria del automóvil a realizar
pedidos importantes. Hasta el año 1979 las ventas van
pasando desde 15 millones de dólares en 1976 a 25 en 1977,
30 en 1978 y 45 millones de dólares
en 1979, es decir, triplicándose en
tres años; otras industrias, diferentes a las del
automóvil, comienzan a descubrir la robótica,
aunque lentamente, produciéndose una espectacular
expansión.
A mediados de los 80, la industria de la
robótica experimentó un rápido crecimiento
debido principalmente a grandes inversiones de las empresas del
automóvil. Esta rápida intención de
transición hacia la industria del futuro tuvo fatales
consecuencias en la viabilidad económica de muchas
empresas, provocando una crisis del sector de la que la industria
de la robótica no se ha recuperado hasta hace pocos
años.
Mirando hacia el
futuro
Las máquinas automatizadas ayudarán cada
vez más a los humanos en la fabricación de nuevos
productos, el mantenimiento de las infraestructuras y el cuidado
de hogares y empresas. Los robots podrán fabricar nuevas
autopistas, construir estructuras de acero para edificios,
limpiar conducciones subterráneas o cortar el
césped. Ya existen prototipos que realizan todas esas
tareas.
Una tendencia importante es el desarrollo
de sistemas microelectromecánicos, cuyo tamaño va
desde centímetros hasta milímetros. Estos robots
minúsculos podrían emplearse para avanzar por vasos
sanguíneos con el fin de suministrar medicamentos o
eliminar bloqueos arteriales. También podrían
trabajar en el interior de grandes máquinas para
diagnosticar con antelación posibles problemas
mecánicos.
Puede que los cambios más
espectaculares en los robots del futuro provengan de su capacidad
de razonamiento cada vez mayor. El campo de la inteligencia
artificial está pasando rápidamente de los
laboratorios universitarios a la aplicación
práctica en la industria, y se están desarrollando
máquinas capaces de realizar tareas cognitivas como la
planificación estratégica o el aprendizaje por
experiencia. El diagnóstico
de fallos en aviones o satélites, el
mando en un campo de batalla o el control de grandes
fábricas correrán cada vez más a cargo de
ordenadores inteligentes.
Eventos, fechas y
datos curiosos
Cuenta la leyenda que, a finales del siglo
XVII, un adolescente alemán era objeto de las burlas de
sus compañeros de clase y de su profesor, por su
dificultad para aprenderse de memoria las tablas de multiplicar.
Ya en su casa, decidió inventar alguna forma más
sencilla de realizar multiplicaciones y demás operaciones.
Y lo hizo: a la mañana siguiente, Gottfried Wilhelm
Leibnitz, que así se llamaba el joven, presentó
ante sus atónitos compañeros y profesor un nuevo
sistema numérico basado en dos dígitos, el
cero y el uno. Leibnitz inventó el
sistema binario, origen de la tecnología digital
y, por lo tanto, componente fundamental en el desarrollo de la
Informática y la Automática.
En el siglo XIX, el barón
húngaro Wolfgang von Kempelen asombró al
mundo con su ajedrecista de Maeltzel. Este
autómata consistía en un muñeco vestido a la
manera turca frente a un gran tablero de ajedrez sobre una mesa.
Fue exhibido de exposición en exposición por las
principales ciudades de Europa y derrotó, entre otros, a
Napoleón y Federico el Grande, rey de Prusia.
Después de un incendio fortuito en una exposición
en Filadelfia, Estados Unidos, en donde se exhibía,
quedó en evidencia que el notable mecanismo del
artefacto era en realidad un enano, experto ajedrecista, que,
escondido bajo el tablero, movía desde allí las
piezas.
Karel Capek fue un escritor
prolífico e influyente. Fue propuesto varias veces como
candidato al premio Nobel. Murió en 1938 de muerte
natural, poco antes de que la Gestapo diera con
él, pues lo querían muerto por sus simpatías
anti-nazis. Sus Robots en la obra de teatro
R.U.R. no estaban fabricados a base de componentes
mecánicos, como se cree, sino que tenían un origen
químico. Esta obra trataba, en realidad, de la
deshumanización del hombre en una civilización
tecnológica. Más tarde escribió en un ensayo
sobre la posibilidad de que algún día existieran
robots pensantes, negando tal posibilidad "con horror" y llegando
a afirmar que la idea de que en unas máquinas pudieran
aflorar sentimientos como el amor o la rebelión
sería "una grave ofensa contra la vida".
Existe cierta evidencia de que la palabra
robot no proviene de Karel Capek, sino de su hermano
Josef, escritor como él. En una carta, cuenta Karel
que le preguntó a su hermano cómo podría
llamar a esos seres que estaba ideando para su nueva obra de
teatro. Él había pensado en llamarlos "Labori",
pero le parecía demasiado culto. "¡Pues
llámalos robots!", le espetó su hermano Josef, y le
volvió la espalda para continuar con sus
asuntos.
En 1927, el director alemán Fritz
Lang creaba el primer robot cinematográfico, un robot
con apariencia de mujer que liberaba a los trabajadores de una
factoría industrial en su película
Metrópolis.
En 1949, sólo dos años
después de que se inventara la primera computadora
electrónica, se comenzó a debatir si algún
día las máquinas podrían llegar a pensar por
sí mismas. Muchas personas, como el neurocirujano
británico Jefferson, dijeron que la inteligencia de
una máquina nunca sería capaz de igualar la de una
persona. Las máquinas no tienen sentimientos, luego nunca
podrían pensar como un humano. El matemático
Alan Turing escribió, sin embargo, que él no
veía ninguna razón por la cual un robot nunca
sería capaz de igualar la inteligencia de un humano en
cualquier campo de trabajo.
Aún llegó más lejos y
declaró que algún día las máquinas
serían capaces de pensar. Para ello, ideó
el Turing Test, un formulario de preguntas que un humano
introduce en una conversación con una máquina. El
ordenador pasa el test cuando sus respuestas consiguen confundir
a su interlocutor humano hasta el punto de que este realmente
piense que está hablando con otra persona. Actualmente,
los investigadores en inteligencia artificial plantean bromas o
cuestiones a las máquinas con el objetivo de lograr una
respuesta emocional. Una de ellas podría ser la siguiente:
"¿Porqué el individuo autoconsciente miró su
imagen en el espejo?". Respuesta: "Para llegar al otro lado". Se
supone que, si la máquina comprende este chiste
malo y, además, se ríe (le hace gracia),
entonces habrá alcanzado el status de individuo
autoconsciente.
Asimov publicó numerosas novelas y
ensayos de ciencia-ficción. Las más famosas son
I, Robot(Yo, Robot)(1950), The Foundation
Trilogy (Trilogía de la
Fundación)(1951-52), The Foundation Edge
(Los límites de la Fundación)(1982) y
The Gods Themselves (Los Dioses mismos)(1972),
novela que ganó los premios Hugo y
Nebula de ciencia-ficción. En Yo, Robot,
propuso sus tres famosas Leyes de la Robótica, a
las que luego añadió una Ley Cero. Estas
son:
Ley Cero: un robot no
dañará a la humanidad, ni permitirá por
inacción que la humanidad sea dañada. Ley
Uno: un robot no dañará a un ser humano, ni
permitirá por inacción que un ser humano sea
dañado, a menos que esto contradiga una ley de mayor
orden.
Ley Dos: un robot debe obedecer
una orden dada por un ser humano, excepto cuando estas
órdenes contradigan una ley de mayor orden.
Ley Tres: un robot debe proteger
su propia existencia siempre que esta protección no
contradiga una ley de mayor orden.
Que se sepa, la implantación de
estas leyes no ha pasado de las novelas.
En 1954 se registró la primera
patente de un robot en el Reino Unido. George C. Devol
patentó el primer robot en Estados Unidos en
1961.
En 1956, dos amigos se encontraron en una
fiesta y estuvieron hablando sobre las novelas de Asimov y la
posibilidad real de construir robots. Estos dos amigos
eran George C. Devol y Joseph F. Engelberger, futuros fundadores
de Unimation y padres de la robótica
moderna.
Ese mismo año, en el Dartmouth
College se muestra el Logic Theorist, una
máquina de inteligencia artificial capaz de elaborar y
comprobar proposiciones lógicas punto a punto.
El primer robot Tralfa se
instaló en 1964 en una factoría noruega, durante un
período de carencia de mano de obra, para pintar
tapacubos. Dos años más tarde, la ciudad industrial
de Byrne (Noruega) contaba con toda una flota de estos "robots
pintores".
La robótica ha contribuido de manera
esencial en la conquista del espacio. En 1966, la nave espacial
robotizada Surveyor aterrizaba en la Luna. En 1970, el
"tractor" ruso Lunakhod recorría la superficie
selenita, tomando muestras. La nave espacial Viking
aterrizaba en 1976 en el suelo de Marte. En 1999, la sonda
Mars Pathfinder tomaba muestras del suelo
marciano…
La primera compañía en usar
visión artificial para una aplicación industrial
fue la General Motors en 1970, en una
factoría de Ontario, Canadá.
El primer país que tuvo una
institución dedicada a los robots fue Japón, que
instauró en 1971 la Japanese Industrial
Robot Association (JIRA).
La primera publicación
periódica a nivel internacional sobre robots se llamaba
The Industrial Robot, y apareció por primera vez
en 1973.
En 1974 se fundó la Robotics
Industries Association (RIA).
En 1977 se fundó la BRA
(British Robotics Association). La palabra Bra
también significa "sujetador", en
inglés.
En 1984, la empresa Robot Defense
Systems introduce el Prowler (Programmable
Robot Observer with Local Enemy Response). Este sería
el primero de los robots con fines militares.
En 1997, el computador Deep Blue
de IBM derrotó en el ajedrez al campeón
mundial Gary
Kasparov, hecho este que
marcó un antes y un después en el desarrollo de la
inteligencia artificial.
Algunos robots famosos


El simpático Robby the
Robot en Forbidden Planet (Planeta
Prohibido)

Tiburón, monstruo
mecánico, de la trilogía Jaws.
El expresivo Johnny Number Five,
en la película Shortcircuit
(Cortocircuito).
Bibliografía
Principios básicos de la
Robótica. Antonio Sánchez. DISA.
UPV.
Enciclopedia Encarta.
Los grandes inventos del señor
humanidad. Las computadoras. Sedmay Ediciones,
S.A.
Reina de los ángeles. Greg
Bear. Ediciones B. www.hipc.org/hipc97/deepblue.html
Basic robotics:
http://www.geocities.com/CapeCanaveral/Lab/8541/basic.html
The computer museum:
http://net.org/html/history/timeline/threads/robots/index.html
Robotics history: http://www.robotics.utexas.edu/rrg/education/history/main.htm
http://www.robotics.utexas.edu/rrg/education/history/dates_and_events/index.htm
Autor:
N/D