y la dirección es en sentido contrario a las manecillas del reloj, por lo tanto el rotor se acelera en esa dirección. En operación normal, los campos magnéticos del estator y del rotor giran a la velocidad sincrónica, mientras que el rotor gira a una velocidad menor.
Deslizamiento de la máquina de inducción.
El deslizamiento de una máquina de inducción, se define como la velocidad relativa entre el campo magnético producido por las corrientes inyectadas en el estator y la velocidad mecánica del rotor, por unidad de la velocidad del campo:
S = (S – Sr) x100 S (1.4)
Siendo s el porcentaje de deslizamiento para fines de cálculo. S es la velocidad síncrona (120f/P) en rpm del campo magnético rotatorio producida por el estator; y Sr es la velocidad del rotor en rpm. En general, a la velocidad del campo se le denomina velocidad síncrona de la máquina, y el deslizamiento indica qué tan cerca se encuentra la máquina de esta velocidad. Si el rotor de la máquina gira a una velocidad mayor que la síncrona, el deslizamiento se hace negativo. Cuando se conocen todos los parámetros del modelo de una máquina de inducción y la fuente de alimentación, el deslizamiento determina el punto de operación. Por esta razón se utiliza esta variable para definir el estado de la máquina.
Características
El motor arranca como un motor de repulsión sobre su característica de repulsión produciendo un par de alrededor de tres acuarto veces el par nominal al acelerar el rotor la frecuencia del rotor y la reactancia del devanado jaula de baja resistencia disminuye y por el circula más corriente para una determinada carga del rotor , el motor funcionara como un motor con vi nado de repulsión y de inducción, si la carga disminuye se precisa un menor desplazamiento y la velocidad del motor aumenta acelerada por su característica de repulsión funciona a la velocidad del sincronismo(deslizamiento nulo)y, puesto que el devanado tipo jaula no corta flujo él no se induce corriente.
Ventajas
elevado par de arranque.
regulación de velocidad.
capacidad de desarrollar par bajo la aplicación de bruscas y fuertes cargas de inestabilidad.

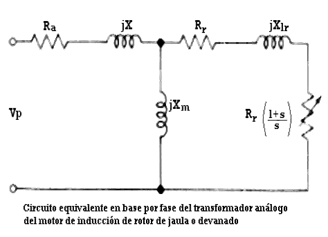
Figura 1.2. Motor de inducción como Transformador.
FUNCIONAMIENTO DE LOS MOTORES DE ASINCRONICOS
Se puede ilustrar el principio del motor de inducción se realiza de la siguiente forma:
Se suspende un imán permanente de un hilo sobre una torna mesa de cobre o aluminio que gira en un cojinete colocado en una placa fija de hierro. El campo del imán permanente se completa así a través de la placa de hierro. El pivote debería estar relativamente sin fricción y el imán permanente debe tener la suficiente densidad de flujo. Cuando gira el imán en el hilo, se observará que el disco que está debajo gira con él, independientemente de la dirección de giro del imán.
El disco sigue el movimiento del imán, como se muestra en la figura debido a las corrientes parásitas inducidas que se producen por el movimiento relativo de un conductor (el disco) y el campo magnético. Por la ley de Lenz, la dirección del voltaje inducido y de las corrientes parásitas consecuentes produce un campo magnético que tiende a oponerse a la fuerza o movimiento que produjo el voltaje inducido.

Figura 2. Grafico del Funcionamiento de un Motor de Inducción.
Las corrientes parásitas que se producen tienden a producir a su vez un polo S unitario en el disco en un punto bajo el polo N giratorio del imán y un polo N unitario en el disco bajo el polo S giratorio del imán. Por lo tanto, siempre que el imán continúe moviéndose, continuará produciendo corrientes parásitas y polos de signo contrario en el disco que está abajo. El disco, por lo tanto, gira en la misma dirección que el imán. pero debe girar a velocidad menor que la del imán. Si el disco girara a la misma velocidad que la del imán, no habría movimiento relativo entre el conductor y el campo magnético y no se producirían corrientes parásitas en el disco.

Característica de Funcionamiento del Motor Asincronico
El funcionamiento de un motor, en general, se basa en las propiedades electromagnéticas de la corriente eléctrica y la posibilidad de crear, a partir de ellas, unas determinadas fuerzas de atracción y repulsión encargadas de actuar sobre un eje y generar un movimiento de rotación.
Suponiendo que un motor de inducción comercial de jaula de ardilla se haga arrancar con el voltaje nominal en las terminales de línea de su estator (arranque a través de la línea) desarrollará un par de arranque de acuerdo que hará que aumente su velocidad. Al aumentar su velocidad a partir del reposo (100 por ciento de deslizamiento), disminuye su deslizamiento y su par disminuye hasta el valor en el que se desarrolle el par máximo. Esto hace que la velocidad aumente todavía más, reduciéndose en forma simultánea el deslizamiento y el par que desarrolla el motor de inducción.
Los pares desarrollados al arranque y al valor del deslizamiento que produce el par máximo ambos exceden (en el caso normal) al par aplicado a la carga. Por lo tanto la velocidad del motor aumentará, hasta que el valor del deslizamiento sea tan pequeño que el par que se desarrolla se reduzca a un valor igual al par aplicado por la carga. El motor continuará trabajando a esta velocidad y valor de equilibrio del desliza-miento hasta que aumente o disminuya el par aplicado.
Curva Característica

Se muestra la relación entre los pares de arranque, máximo y nominal a plena carga que desarrolla un motor de inducción, como función de la velocidad de éste y del deslizamiento. Esta figura es presentación gráfica de la corriente y el par desarrollados en el rotor del motor como funciones del deslizamiento desde el instante del arranque (punto a) hasta la condición de funcionamiento en estado estable (en general entre marcha en vacío y marcha a plena carga – puntos c y d) cuando los pares desarrollado y aplicado son iguales.
Circuito Equivalente de un motor de Inducción por fase
CLASES DE DISEÑO DE MOTORES DE INDUCCIÓN


Figura 3. Curvas características típicas para diferentes diseños de motores.
DISEÑO CLASE A.
Es un motor de jaula de ardilla para usarse a velocidad constante. Sus principales características son:
Buena capacidad de disipación de calor.
Alta resistencia y baja reactancia al arranque.
El par máximo está entre 200% y 300% del par de plena carga y ocurre a un bajo deslizamiento.
Aceleración bastante rápida hacia la velocidad nominal.
Presenta la mejor regulación de velocidad, entre el 2 y 4%.
Desafortunadamente su corriente de arranque varía entre 5 y 7 veces la corriente nominal.
Han sido reemplazados por los motores de diseño clase B en los últimos años.
Se utilizan en ventiladores, sopladores, bombas, tornos, etc. 12
DISEÑO CLASE B.
Se les llama motores de propósito general y a este tipo pertenecen la mayoría de los motores con rotor de jaula de ardilla. A continuación se resumen sus características:
Par de arranque normal, baja corriente de arranque y bajo deslizamiento.
Produce casi el mismo par de arranque que el diseño anterior.
El par máximo es mayor o igual al 200% el par de carga nominal
Deslizamiento bajo (menor del 5%).
Se prefieren sobre los diseños de clase A por requerir poca corriente de arranque.
DISEÑO CLASE C.
Se utilizan para cargas con alto par de arranque, como bombas, compresores y transportadores.
Alto par de arranque (entre 2 y 2.5 veces el nominal) con bajas corrientes de arranque (de 3.5 a 5 veces la nominal).
Son construidos con un rotor de doble jaula (más costosos).
Bajo deslizamiento (menos del 5%) a plena carga.
Debido a su alto par de arranque, acelera rápidamente.
Cuando se emplea con cargas pesadas, se limita la disipación térmica del motor, ya que la mayor parte de la corriente se concentra en el devanado superior.
Tiende a sobrecalentarse con arranques frecuentes.
DISEÑO CLASE D.
También conocidos como de alto par y alta resistencia.
Alto par de arranque (275% o más del nominal) y baja corriente de arranque.
Alto deslizamiento a plena carga.
La alta resistencia del rotor desplaza el par máximo hacia una velocidad muy baja.
Diseñado para servicio pesado de arranque, en especial grandes volantes utilizados en troqueladoras o cortadoras.
También existen las clases E y F, llamados motores de inducción de arranque suave, pero obsoletos hoy en día.
SISTEMAS DE ARRANQUE
En el motor de "jaula de ardilla", el giro motor se produce por la interacción entre el campo magnético del estator (giratorio) y el inducido en los bobinados de rotor (espiras en cortocircuito). Se conocen como motores asíncronos, ya que la velocidad de sincronismo no se alcanza nunca.

f: frecuencia de red
p: nº de pares de polos
Par Motor, Resistente y Motriz
Arranque Directo.
Se realiza en un solo tiempo
El estator se acopla directamente al red
La corriente inicial es de 4 a 8 veces la nominal. Se considera para cálculos Ia=6.In
Solo se utiliza con motores de pequeña y mediana potencia y si la red lo permite.
El par de arranque Ma ˜ 1"5 Mn
El par máximo se alcanza aproximadamente al 80 % de la velocidad nominal.
No se recomienda en montacargas ni en cintas transportadoras por el par de arranque.
El motor solo necesita tres bornes U – V – W. La conexión interna dependerá de la tensión de la línea. Para el giro a derechas se conectan:
L1 – U
L2 – V
L3 – W
Para el cambio de giro, se intercambian dos.

QS1: Seccionador fusible
S2Q: Pulsador de paro
S3Q: Pulsador de marcha
FR1: Relé térmico
K1M: Contactor principal
M1: Motor trifásico
Arranque directo con inversión de giro
Circuito de potencia

ARRANQUE ESTRELLA – TRIÁNGULO
Es necesario disponer de un motor con los 6 bornes (2 por bobina)
El motor arranca en estrella
La tensión de los bobinados se reduce en al 57%
El par se reduce al 33%
La corriente de arranque se reduce a 2 veces In
Al alcanzar la máxima velocidad, el motor se desconecta momentáneamente y a continuación se conecta en triángulo para alcanzar la velocidad de régimen
Durante la desconexión de puede producir una pequeña pérdida de par y un pico de corriente
Es el arranque más utilizado por su sencillez, precio y prestaciones.
Variación M/n e I/n en el arranque
Circuito de potencia

Circuito de mando

Arranque estrella-triángulo con inversión de giro
Circuito de potencia (versión simplificada)

Circuito de mando

ARRANQUE ESTRELLA – TRIÁNGULO/RESISTENCIAS – TRIÁNGULO
Similar al arranque estrella-triángulo, añade un paso intermedio haciendo una conexión en triángulo, con una resistencia en serie con el bobinado de cada fase.
Minimiza los transitorios en el paso de estrella a triángulo
Se pueden realizar diversas variantes dependiendo del circuito de mando
Con y sin corte de alimentación entre pasos
Con y sin temporización entre ?R y ?
Circuito de potencia

Arranque estrella-R/triángulo-triángulo
Circuito de mando

ARRANQUE MEDIANTE RESISTENCIAS ESTATÓRICAS
Colocando resistencias en serie con el estator, se puede elegir la tensión de arranque y por tanto la intensidad de arranque.
El motor arranca en dos o más etapas, conectando una resistencia en serie con cada bobina del estator.
El valor de la resistencia se reduce en cada etapa
Cada etapa necesita un contactor enclavado y una temporización
Ventajas
Arranque configurable. Se puede elegir la Ia
Arranque suave. La velocidad aumenta a tramos
La alimentación es continua. No hay cortes
Desventajas
Es caro
Un método económico es utilizar resistencias líquidas (cubos de carbonato de sodio)
El par de arranque es pequeño
Es un método ineficaz y con gran pérdida calórica.
Circuito de potencia para 2 etapas

Circuito de mando para 2 etapas

ARRANQUE MEDIANTE AUTOTRANSFORMADOR
Se intercala un autotransformador en la línea. Variando la relación de transformación podemos elegir la corriente o el par de arranque necesario
El motor arranca en dos o más etapas, incluso de manera continua, utilizando un autotransformador variable
Cada etapa necesita un contactor enclavado y una temporización
Ventajas
Arranque suave y configurable
La alimentación puede ser continua o no
El par de arranque no queda muy penalizado
Desventajas
Es caro. El autotransformador se fabrica bajo pedido
Circuito de potencia para 2 etapas

Circuito de mando para 2 etapas. Conmutación cerrada

ARRANQUE MEDIANTE RESISTENCIAS ROTÓRICAS
En el motor de jaula de ardilla, el par máximo se alcanza aproximadamente al 80% de la velocidad nominal (nn)
En un motor de rotor bobinado se puede desplazar el par máximo a velocidades bajas, intercalando resistencias en serie con el rotor.
Utilizando varios grupos de resistencias, se puede conseguir un arranque suave con un par elevado durante todo el periodo de arranque.
La intensidad, y por tanto el consumo, se mantiene moderada durante el periodo de arranque.
El motor de rotor bobinado es más caro. Se utiliza cuando hace falta arrancar suavemente con una carga elevada.
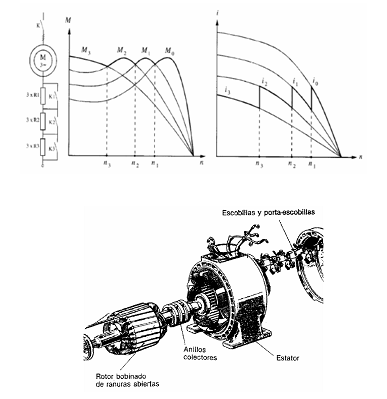
Figura5. Motor de anillos rozantes
Circuito de potencia para 3 etapas

Arrancador estático por control de fase

Arranque por rampa de tensión
El arranque por rampa de tensión es un método de arranque que aplica al motor un incremento de tensión constante.
En el ejemplo, la tensión de salida del arrancador varía de 0 a 100% en cuatro segundos.
Existe un retraso entre el inicio de la rampa de arranque y el giro del motor.
El tiempo de la rampa es ajustable por el usuario.

Normalmente se aplica un nivel de tensión de Arranque, ajustado por el usuario. Esto asegura que el motor empiece a girar inmediatamente y sin "agarre".
La rampa se inicia con un nivel preseleccionado y a partir de ahí, aumenta con un incremento constante.
En el ejemplo, el nivel "start volt" se ha situado en el 40% de la tensión nominal.

Arranque con límite de corriente
El Arranque con Límite de Corriente es un método de arranque que sólo está disponible en los Arrancadores de Tensión Reducida con monitoreo de corriente de salida (microprocesador con mayor capacidad de cálculo).
La máxima corriente de arranque requerida es preseleccionada por el usuario.
En el arranque, la tensión de salida aumentará con el valor de rampa seleccionado hasta que la corriente del motor alcance el nivel máximo.
La rampa de tensión de salida es automáticamente ajustada para mantener la corriente de arranque a este nivel o por debajo de él.

En la primera figura se ha ajustado un límite de corriente del 400%.
La carga se acelera hasta la velocidad nominar de forma correcta.
En la segunda figura, el límite de corriente se ha ajustado al 200% de la In.
En un punto del ciclo de arranque, el par requerido por la carga (resistente) excede el par disponible en el motor.
El motor entrará en un "atascamiento" y no acelerará más allá de este punto, hasta que la tensión de salida aumente lo suficiente.
El motor continuará absorbiendo el doble de la corriente nominal.
El motor se sobrecalentará muy rápidamente, ya que tendrá un enfriamiento reducido por su velocidad reducida.

Fotos de motores asíncronos y de placas
Datos de las placas de los motores de inducción.
Mostraremos las características y datos técnicos de motores asincrónicos a continuación:
Motor Asincrono 1
Este motor nos está indicando que se trata de un motor trifásico alterno. Para lo cual nos fijarnos en el 3 y el símbolo de corriente alterna.
Lo que si cada fabricante tiene su propia nomenclatura para identificar la clase o tipo de motor, que en este caso tenemos la nomenclatura 1PH7 que buscando en internet es un motor trifásico asíncrono de Jaula de Ardilla.
Posee también una nomenclatura IM B3 nos indica las características mecánicas correspondiente al modelo de este motor, nos referimos a la forma constructiva, es decir, medidas, tamaños. Cada fabricante tiene su propia nomenclatura.Además la nomenclatura IP 55 nos indica que tipo de protección mecánica tiene el modelo de motor. Hay que tener en cuenta varias cosas. Según lo investigado la nomenclatura está normalizada internacionalmente, lo que quiere decir que todos los fabricantes están sometidos a ella. También tenemos que observar que la nomenclatura dispone de 2 números, lo cual quiere decir que cada número significa una cosa diferente. Podemos decir que se trata de una nomenclatura numérica.
Motor Siemens Jaula de Ardilla
La placa nos explica que el motor puede estar alimentado con dos tensiones diferentes, la primera en conexión doble estrella para la tensión menor que es de 220v y para trabajar con mayor voltaje que en este caso 440v sería necesario una conexión en estrella. Este dato es importante porque nos dice que tipo de arranque está disponible en el motor.
Tenemos también como otro dato las intensidades que consumirá el motor en los arranques a diferentes tensiones. En este caso disponemos de dos tensiones, así que tenemos dos intensidades. La primera de 1,9 A para el primer voltaje y la segunda de 0,95 A para el voltaje de 440v.El factor de potencia Cosf se refiere a la relación existente entre la potencia real y la potencia aparente que en este motor es de 0,81. Cuando mayor sea el factor de potencia, mayor será la potencia transformada, es decir, mejor beneficio dará el motor.
La frecuencia nos indica que potencia tendremos que en este caso es de 60 Hz., tiene un peso total de 4,7 kg., Las revoluciones de este motor serán de 1590 por minuto. Tiene un torque en el eje de 2,9 Nm.
Vale recalcar que la temperatura ambiente en la que el motor puede trabajar correctamente está entre -15 grados centígrados y 40 grados centígrados.

Placa del motor Siemens Jaula de Ardilla.
Motor Asincrono 2
Este motor de la marca WEG hecho en Brazil que puede funcionar con dos voltajes el primero de 110 V y el segundo 220 V, estos motores son de fase simple que posee dos líneas L1 y L2.
La corriente con el primer voltaje es de 27.60 A, con la segunda tensión de 220 V la corriente es de 13.80 A.

Motor WEG de 2 HP
Con una temperatura ambiente de 40 grados centígrados para que el motor puede trabajar correctamente, además que este motor tiene una característica muy importante que es el enfriamiento interno que posee.
Las conexiones para un voltaje bajo se aprecia en el lado derecho de la placa donde debemos tener en cuenta los respectivos puentes para las L1 y L2, para un voltaje alto también se aprecia la forma de conectar las dos líneas L1 y L2 para obtener un voltaje de 220 V.
Tenemos también que este motor funciona con la frecuencia de 60 Hz. Las revoluciones de este motor serán de 1720 por minuto.

Placa de un Motor WEG
Motor Asincrono 3
Este motor de fase simple que posee dos líneas L1 y L2 puede funcionar con dos voltajes ya sea de 110 V o también a 220 V.
Este motor tiene el mismo tipo de conexión del motor anterior que es para un voltaje bajo de 110 V como podemos ver en la placa donde observamos los puentes para las L1 y L2, para un voltaje alto también se aprecia la forma de conectar las dos líneas L1 y L2 para obtener un voltaje de 220 V.
La corriente con el primer voltaje es de 13.50 A, con la segunda tensión de 220 V la corriente es de 6.75 A.
Las revoluciones por minuto de este motor serán de 1730. También debemos tener en cuenta que el motor trabaja idealmente con una temperatura ambiente de 40 grados centígrados y a una frecuencia de 60 Hz.

Motor WEG de 1 HP

Placa de un Motor WEG
Motores trifásicos asíncronos con características y datos técnicos




Conclusiones
Este trabajo fue importante realizarlo ya que aprendimos mas sobre el funcionamiento de los motores de inducción, sus características, sus tipos, diseños que existen según la norma NEMA. También se pudo aprender que la diferencia entre el motor a inducción y el motor síncrono es que en el motor a inducción el rotor no es un imán permanente sino que es un electroimán. Tiene barras de conducción en todo su largo, incrustadas en ranuras a distancias uniformes alrededor de la periferia. Las barras están conectadas con anillos (en cortocircuito como dicen los electricistas) a cada extremidad del rotor. Están soldadas a las extremidades de las barras. Este ensamblado se parece a las pequeñas jaulas rotativas para ejercer a mascotas como hamsters y por eso a veces se llama "jaula de ardillas", y los motores de inducción se llaman motores de jaula de ardilla.
Cada par de barras es una revolución en cortocircuito, hablando
magnéticamente. El rotor se magnetiza por las corrientes inducidas en
sus barras, debido a la acción del campo magnético, girando en
el estator. Mientras que el campo del estator pasa a lo largo de las barras
del rotor, el campo magnético que cambia induce altas corrientes en ellas
y genera su propio campo magnético. La polaridad del campo magnético
inducido del rotor es tal que repela al campo del esta torque lo creó,
y esta repulsión resulta en un torque sobre el rotor que le causa de
girar.
Bibliografía
Maquinas Eléctricas/Stephen J. Chapman/4ta edición.
http://www.delorenzogroup.com/dl/spa/prodotti-sp/eurolab/euro_spa07.pdf
http://www.dliengineering.com/vibman-spanish/motoresainduccin.htm
http://www.monografias.com/trabajos72/motores-induccion-monofasicos/motores-induccion-monofasicos2.shtml
http://www3.fi.mdp.edu.ar/maquinas-electricas/Teorias%20PDF/MEI/PDF%20Presentaciones%20en%20Impress%20%28.odp%29/T12-%20Motor%20Sincr%F3nico.pdf
http://www.tecnoedu.com/F1000/ModuloXXXII.php
http://www.docentes.utonet.edu.bo/schoquechambim/wp-content/uploads/capituloIX.pdf
http://www.dspace.espol.edu.ec/bitstream/123456789/1070/1/1907.pdf
http://www.ceaqueretaro.gob.mx/users/ceaqro/obrapublica/b1/MOTOR900.pdf
Autor:
Pablo Llivicura
Ing. Electronica
Universidad Politecnica Salesiana
Sede Cuenca
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |