- Objetivos
- Introducción
- Materiales
- Modelamiento matemático del motor DC
- Diseño y características de la planta
- Conclusiones
- Recomendaciones
- Bibliografía
- Anexos
Objetivos
Objetivo General
Objetivos Específicos
Determinar las especificaciones requeridas para una planta devanadora, utilizada para enrollar cable o alambre.
Medir la velocidad a la que gira el eje de un motor DC mediante un opto-acoplador que es el fundamento de un tacómetro digital.
Obtener un muestreo de datos mediante un protocolo de comunicación hacia MATLAB.
Utilizar el comando IDENT para identificar el tipo de sistema y sus diversas aplicaciones.
Introducción
Los sistemas de control son aquellos dedicados a obtener la salida deseada
de un sistema o proceso. En un sistema general se tienen una serie de entradas
que provienen del sistema a controlar, llamado planta, y se diseña un
sistema para que, a partir de estas entradas, modifique ciertos parámetros
en el sistema planta, con lo que las señales anteriores volverán
a su estado normal ante cualquier variación.
JUSTIFICACIÓN
Para lograr una alta prestación de los accionamientos llevados a cabo por un motor que forma parte de un sistema de control, es necesario estudiar las características dinámicas de estos y desarrollar estrategias de control acorde con las mismas.
Es por esta razón que la presente actividad pretende tener un acercamiento al control en una planta real, donde se diseñará un control de velocidad del motor DC y se lo manejará de manera adecuada a la aplicación elegida.
Materiales
Motor DC
El motor de corriente continua es una máquina que convierte la energía eléctrica en mecánica, principalmente mediante el movimiento rotativo. Esta máquina de corriente continua es una de las más versátiles en la industria. Su fácil control de posición, par y velocidad la han convertido en una de las mejores opciones en aplicaciones de control y automatización de procesos.

Carrete
Cilindro generalmente con el eje hueco, con rebordes o discos en sus
bases, en el que se enrollan hilos, cables u otro material flexible. En nuestro
caso nuestro carrete es de madera y tiene un diseño especial para simular
el enrollado de alambre

Ilustración 2 CARRETE
Sensor
La etapa de medición se realiza mediante el uso de un opto-acoplador H21A1, siguiendo el principio de funcionamiento de un tacómetro digital, a través del cual se hace pasar un disco de ranurado codificado colocado en la parte posterior del eje del motor. El disco codificado de 30 pulsos/rev. Los pulsos emitidos son realimentados al microcontrolador para así calcular la velocidad de rotación del motor.

Ilustración 3 DISCO RANURADO
Microcontrolador

Para la etapa de procesamiento de datos, utilizamos el microcontrolador
PIC 16F877A de 40 pines el cual nos permitió conectar el display LCD
para desplegar los datos obtenidos, el sensor y la conexión Serial hacia
la PC.
Ilustración 4 PIC 16F877A
DIAGRAMA DE BLOQUES

Ilustración 5 DIAGRAMA DEL SISTEMA
Etapa de Potencia
Mediante un integrado 555 generamos un PWM para hacer girar el motor, esta etapa se la acopló a la etapa de potencia, en la cual se utilizó un transistor IRFZ44N que permite soportar corrientes altas y darle mayor potencia al motor.

Ilustración 6 DIAGRAMA CIRCUITAL ETAPA DE POTENCIA
Etapa de Sensado
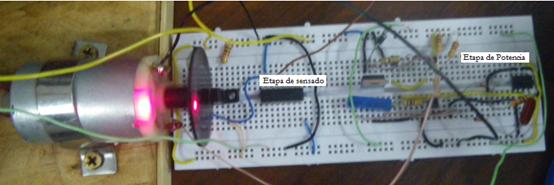
Ilustración 7 CIRCUITO IMPLEMENTADO ETAPA DE SENSADO Y POTENCIA
Etapa del Microcontrolador

Ilustración 8 DIAGRAMA CIRCUITAL MICROCONTROLADOR

Ilustración 9 CIRCUITO IMPLEMENTADO CIRCUITO MICROCONTROLADOR
Modelamiento matemático del motor DC
Se debe contar, para realizar el diseño del sistema de control, con el modelo fenomenológico de la dinámica del motor de CC. Se cuenta con un motor de CC de excitación independiente, el que puede modelarse mediante un circuito equivalente, el que se muestra en la figura

Ilustración 10 MODELO CIRCUITAL DEL MOTOR DC
Circuito del motor de CC. La parte izquierda modela el estator y, la derecha, el rotor
Las ecuaciones que describen el comportamiento del motor son:

Por lo tanto, la función de transferencia que caracteriza al motor y que relaciona la frecuencia (en RPM) a la que gira el motor con el voltaje de armadura está dada por:
Página siguiente  |