Indice
1.
Antecedentes.
3. Planeación y control de
proyectos con PERT-CPM
4. Red de Actividades
5. Enfoque de tres estimaciones de
PERT.
6. Método CPM para trueques entre tiempo
y costo
7. Elección entre PERT y
CPM
8. Diferencias Entre PERT y
CPM
9. Bibliografía
1.
Antecedentes.
Dos son los orígenes del método del
camino crítico: el método PERT (Program
Evaluation and Review Technique) desarrollo por
la Armada de los Estados Unidos de
América, en 1957, para controlar los
tiempos de ejecución de las diversas actividades
integrantes de los proyectos espaciales, por la necesidad de
terminar cada una de ellas dentro de los intervalos de tiempo
disponibles. Fue utilizado originalmente por el control de
tiempos del proyecto Polaris
y actualmente se utiliza en todo el programa
espacial.
El método CPM (Crítical Path Method), el segundo
origen del método actual, fue desarrollado también
en 1957 en los Estados Unidos de América, por un centro de
investigación de operaciones para la firma
Dupont y Remington Rand, buscando el control y la
optimización de los costos de
operación mediante la planeación
adecuada de las actividades componentes del proyecto.
Ambos métodos
aportaron los elementos administrativos necesarios para formar el
método del camino crítico actual, utilizando
el control de los tiempos de ejecución y los costos de
operación, para buscar que el proyecto total sea ejecutado
en el menor tiempo y al menor costo
posible.
2. Usos
El campo de acción de este método es muy
amplio, dada su gran flexibilidad y adaptabilidad a cualquier
proyecto grande o pequeño. Para obtener los mejores
resultados debe aplicarse a los proyectos que posean las
siguientes características:
- Que el proyecto sea único, no repetitivo, en
algunas partes o en su totalidad. - Que se deba ejecutar todo el proyecto o parte de el,
en un tiempo mínimo, sin variaciones, es decir, en
tiempo crítico. - Que se desee el costo de operación más
bajo posible dentro de un tiempo disponible.
Dentro del ámbito aplicación, el
método se ha estado usando
para la planeación y control de diversas actividades,
tales como construcción de presas, apertura de
caminos, pavimentación, construcción de casas y
edificios, reparación de barcos, investigación
de mercados, movimientos de colonización, estudios
económicos regionales, auditorias,
planeación de carreras universitarias, distribución de tiempos de salas de
operaciones,
ampliaciones de fábrica, planeación de itinerarios
para cobranzas, planes de venta, censos de
población, etc.
3. Planeación y
control de proyectos con PERT-CPM
La buna administración
de proyectos a gran escala requiere
planeación, programación y coordinación cuidadosa de muchas
actividades interrelacionadas. Al principiar la década de
1950 se desarrollaron procedimientos
formales basados en uso de redes y de las técnicas
de redes para ayudar en estas tareas. Entre los procedimientos
mas sobresalientes se encuentran el PERT (técnica de
evaluación y revisión de programas) y el
CPM (método de la ruta critica).Aunque originalmente los
sistemas tipo
PERT se aplicaron para evaluar la programación de un
proyecto de
investigación y desarrollo, también se usan
para controlar el avance de otros tipos de proyecto especiales.
Como ejemplos se pueden citar programas de construcción,
la programación de computadoras,
la preparación de propuestas y presupuestos,
la planeación de l mantenimiento
y la instalación de sistemas de computo, este tipo de
técnica se ha venido aplicando aun a la producción de películas, a las
compañas políticas
y a operaciones quirúrgicas complejas.
El objetivo de
los sistemas tipo PERT consiste en ayudar en la planeación
y el control, por lo que no implica mucha optimización
directa. Algunas veces el objetivo primario es determinar la
probabilidad
de cumplir con fechas de entrega especificas. También
identifica aquellas actividades que son más probables que
se conviertan en cuellos de botella y señala, por e4nde,
en que puntos debe hacerse el mayor esfuerzo para no tener
retrasos. Un tercer objetivo es evaluar el efecto de los cambios
del programa. Por ejemplo, se puede valorar el efecto de un
posible cambio en la
asignación de recursos de las
actividades menos criticas a aquellas que se identificaron con
cuellos de botella. Otra aplicación importante es la
evaluación del efecto de desviarse de lo programado.
Todos los sistemas tipo PERT emplean una red de proyecto para
visualizar gráficamente la interrelación entre sus
elementos. Esta representación del plan de un
proyecto muestra todas las
relaciones de procedencia, respecto al orden en que se deben
realizar las actividades. En la Fig. 1 sé muestran estas
características para la red de proyecto inicial para
la construcción de una casa. Esta red indica que la
excavación debe hacerse antes de poner los cimientos y
después los cimientos deben completarse antes de colocar
las paredes. Una vez que se levantan las paredes se pueden
realizar tres actividades en paralelo. Al seguirla red hacia
delante se ve el orden de las tareas subsecuentes.
En la terminología de PERT, cada arco de la red representa
una actividad, es decir, una de las tareas que requiere el
proyecto, cada nodo representa un evento que por lo general se
define con el momento ñeque se terminan todas las
actividades que llegan a ese nodo, Las puntas de flecha indican
la secuencia en la que3 debe ocurrir cada uno de esos eventos. Lo que
es mas, un evento debe preceder a la iniciación de las
actividades que llegan a ese nodo. Las puntas de flecha indican
la secuencia en la que debe ocurrir cada uno de esos eventos. Lo
que es mas, un evento debe preceder a la iniciación de las
actividades que salen de ese nodo. (En la realidad, con
frecuencia se pueden traslapar etapas sucesivas de un proyecto,
por lo que la red puede representar una aproximación
idealizada del plan de un proyecto.)
El nodo hacia el que todas las actividades se dirigen es el
evento que corresponde a la terminación desde su
concepción, o bien, si el proyecto ya comenzó, el
plan para su terminación. En él ultimo caso, cada
nodo de la red sin arcos que llegan representa el evento de
continuar una actividad en marcha o el evento de iniciar una
nueva actividad que puede comenzar en cualquier momento.
Cada arco juega un doble papel, el de
representar una actividad y el de ayudar a representar las
relaciones de procedencia entre las distintas actividades. En
ocasiones, se necesita un arco para definir las relaciones de
procedencia aun cuando no haya una actividad real que
representar. En este caso, se introduce una actividad ficticia
que requiere un tiempo cero, en donde el arco que representa esta
actividad ficticia se muestra como una flecha punteada que indica
esa relación de procedencia. Por ejemplo,
considérese el arco 5 ® 8 que representa una actividad ficticia en
la Fig. 1; el único objeto de este arco es indicar que la
colocación de la tubería debe estar terminada antes
de poder comenzar
los exteriores.
Una regla común para construir este tipo de redes es que
dos nodos no pueden estar conectados directamente por mas de un
arco. Las actividades ficticias también se pueden usar
para evitar violar esta regla cuando se tienen dos o más
actividades concurrentes; en la Fig. 1 se ilustra esto con el
arco 11® 12.
El único propósito de este arco es indicar que debe
terminarse la colocación de pisos antes de instalar los
acabados interiores sin tener dos arcos del nodo 9 al nodo
12.
Una vez desarrollada la red la red de un proyecto, el siguiente
paso es estimar el tiempo que se requiere para cada actividad.
Estas estimaciones para el ejemplo de la construcción de
una casa de la figura 1. se muestran en la figura 2 con los
números mas oscuros (en unidades de días de
trabajo) que aparecen junto a los arcos. Estos tiempos se usan
para calcular dos cantidades básicas para cada evento, a
saber, su tiempo más próximo y su tiempo más
lejano.
El tiempo más próximo para un evento es el tiempo
(estimado) en el que ocurrirá el evento si las actividades
que lo proceden comienzan lo mas pronto posible.
Los tiempos más próximos se obtienen al efectuar
una pasada hacia delante a través de la red, comenzando
con los eventos iniciales y trabajando hacia delante en el
tiempo, hasta los eventos finales, para cada evento se hace un
calculo del tiempo en el que ocurrirá cada uno, si cada
evento procedente inmediato ocurre en su tiempo más
próximo y cada actividad que interviene consume
exactamente su tiempo estimado. La iniciación del proyecto
se debe etiquetar con el tiempo 0. este proceso se
muestra en la tabla 1. para el ejemplo considerado en las figuras
1 y 2. los tiempos más próximos que se obtuvieron
están registrados en la figura 2, con el primero de los
dos números que se dan para cada nodo.
El tiempo más lejano para un evento es él ultimo
momento (estimado) en el que puede ocurrir sin retrasar la
terminación del proyecto mas allá de su tiempo
más próximo.
Tabla 1. Calculo de los tiempos más
próximos para el ejemplo de la construcción de una
casa.
Evento | Evento inmediato Anterior | Tiempo Tiempo mas + de la próximo actividad | Tiempo = máximo más próximo |
1 | ___ | ___ | 0 |
2 | 1 | 0 + 2 | 2 |
3 | 2 | 2 + 4 | 6 |
4 | 3 | 6 + 10 | 16 |
5 | 4 | 16 + 4 | 20 |
6 | 4 | 16 + 6 | 22 |
7 | 4 | 16+7 | 25 |
5 | 20+5 | ||
8 | 5 | 20+0 | 29 |
6 | 22+7 | ||
9 | 7 | 25+8 | 33 |
10 | 8 | 29+9 | 38 |
11 | 9 | 33+4 | 37 |
12 | 9 | 33+5 | 38 |
11 | 37+0 | ||
13 | 10 | 38+2 | 44 |
En este caso los tiempos más lejanos se obtienen
sucesivamente para los eventos al efectuar una pasada hacia
atrás a través de la red, comenzando con los
eventos finales y trabajando hacia atrás en el tiempo
hasta los iniciales. Para cada evento él calculo del
tiempo final en el que puede ocurrir un evento de manera que los
que le siguen ocurran en su tempo mas lejano, si cada actividad
involucrada consume exactamente su tiempo estimado. Este proceso
se ilustra en la tabla 2, en donde 44 días es el tiempo
más próximo y el tiempo más lejano para la
terminación del proyecto de construcción de la
casa. Los tiempos más lejanos para la terminación
del proyecto de construcción de la casa. Los tiempos mas
lejanos que se obtuvieron se encuentran también en la
figura 2 como el segundo numero que se da para cada nodo.
Sea la actividad ( i , j ) la actividad que va del evento i al
evento j en la red del proyecto.
La holgura para un evento es la diferencia entre su tiempo
más lejano y su tiempo más
próximo.
La holgura para una actividad ( i , j ) e3s la
diferencia entre [ el tiempo mas lejano del evento] y [el tiempo
mas próximo del evento i mas el tiempo estimado para la
actividad].
Así, si se supone que todo lo demás marcha a
tiempo, la holgura para un evento indica cuanto retraso se puede
tolerar para llegar a ese evento sin retrasar la
terminación del proyecto, y la holgura para una actividad
indica lo mismo respecto a un retraso en la terminación de
esa actividad. En a tabla 3 se ilustran los calculo de estas
holguras para el proyecto de la construcción de una
casa.
Una ruta critica de un proyecto es una ruta cuyas actividades
tienen la holgura cero. (Todas las actividades y eventos que
tienen holgura cero deben estar sobre una ruta crítica,
pero no otras.)
Tabla 2. Calculo de los tiempos más lejanos para el
ejemplo de la construcción de una casa
Evento | Evento inmediato Anterior | Tiempo Tiempo mas – de la lejano actividad | Tiempo = mínimo más próximo |
13 | __ | ___ | 44 |
12 | 13 | 44-6 | 38 |
11 | 12 | 38-0 | 38 |
10 | 13 | 44-2 | 42 |
9 | 12 | 38-5 | 33 |
11 | 38-4 | ||
8 | 10 | 42-9 | 33 |
7 | 9 | 33-8 | 25 |
6 | 8 | 33-7 | 26 |
5 | 8 | 33-0 | 20 |
7 | 25-5 | ||
4 | 7 | 25-7 | 16 |
6 | 26-6 | ||
5 | 20-4 | ||
3 | 4 | 16-10 | 6 |
2 | 3 | 6-4 | 2 |
1 | 2 | 2-2 | 0 |
Tabla 3. Calculo de las holguras para el ejemplo de la
construcción de una casa.
Evento | Holgura | Actividad | Holgura | |||
1 2 3 4 5 6 7 8 9 10 11 12 13 |
| 0 – 0 = 0 2 – 2 = 0 6 – 6 = 0 16 – 16 = 0 20 – 20 = 0 26 – 22 = 4 25 – 25 = 0 33 – 29 = 4 33 – 33 = 0 42 – 38 = 4 38 – 37 = 1 38 – 38 = 0 44 – 44 = 0 |
| (1,2) (2,3) (3,4) (4,5) (4,6) (4,7) (5,7) (6,8) (7,9) (8,10) (9,11) (9,12) (10,13) (12,13) |
| 2 – (0+2) = 0 6 – (2+4) = 0 16 – (6+10) = 0 20 – (16+4) = 0 26 – (16+6) = 4 25 – (16+7) = 2 25 – (20+5) = 0 33 – (22+7) = 4 33 – (25+8) = 0 42 – (29+9) = 4 38 – (33+4) = 1 38 – (33+5) = 0 44 – (38+2) = 4 44 – (38+6) = 0 |
Si se verifica en la tabla 3 las actividades que tienen
holgura cero, se observa que el ejemplo de la construcción
de una casa tiene una ruta critica, 1 ® 2 ® 3 ® 4 ® 5 ® 6 ® 7 ® 9 ® 12 ® 13, como se muestra en la figura 2 con las
flechas mas oscuras. Esta secuencia de actividades criticas debe
mantenerse estrictamente a tiempo, si se quiere evitar retrasos
en la terminación del proyecto. Otros proyectos pueden
tener mas de una ruta critica; por ejemplo nótese lo que
pasaría en la figura 2 si el tiempo estimado de la
actividad (4,6) se cambiara de 6 a 19.
Resulta interesante observar en la tabla 3 que mientras que todos
los eventos sobre la ruta critica (inclusive el 4 y el 7 )
necesariamente tienen holgura cero, no es así para la
actividad (4 , 7), ya que su tiempo estimado es menor que la suma
de los tiempos estimados para las actividades (4 , 5 ) y (5 , 7).
En consecuencia, estas ultimas actividades están en la
ruta crítica, pero la actividad (4 , 7) no lo
está.
Esta información sobre los tiempos más
cercanas y más lejanos, las holguras y la ruta
crítica, es invaluable para el administrador del
proyecto. Entre otras cosas, le permite investigar el efecto de
posible mejoras en la planeación para determinar en donde
debe hacerse un esfuerzo especial para mantenerse y evaluar el
impacto de los retrasos.
Graficas PERT
La gráfica PERT es una gráfica original de redes no
medidas que contiene los datos de las
actividades representadas por flechas que parten de un evento i y
terminan en un evento j.

En la parte superior de la flecha se indica el
número de identificación, generalmente los
números de los eventos (i-j). En la parte inferior aparece
dentro de un rectángulo la duración estándar
(t) de la actividad. En la mitad superior del evento se anota el
número progresivo, en el cuarto inferior izquierdo la
última lectura del
proyecto y en el cuarto inferior derecho la primera lectura del
proyecto.
Esta gráfica tiene como ventaja la de informar las fechas
más tempranas y más tardías de
iniciación y terminación de cada actividad, sin
tener que recurrir a la matriz de
holguras.

Veamos cómo se presenta la ampliación de
la fábrica por medio de una gráfica
PERT.
Se llama red la representación gráfica de
las actividades que muestran sus eventos, secuencias,
interrelaciones y el camino critico. No solamente se llama camino
critico al método sino también a la serie de
actividades contadas desde la iniciación del proyecto
hasta su terminación, que no tienen flexibilidad en su
tiempo de ejecución, por lo que cualquier retraso que
sufriera alguna de las actividades de la serie provocaría
un retraso en todo el proyecto.
Desde otro punto de vista, camino critico es la serie de
actividades que indica la duración total del proyecto.
Cada una de las actividades se representa por una flecha que
empieza en un evento y termina en otro.
Se llama evento al momento de iniciación o
terminación de una actividad. Se determina en un tiempo
variable entre el más temprano y el más
tardío posible, de iniciación o de
terminación.
A los eventos se les conoce también con los
nombres de nodos.
Evento Evento
I j
El evento inicial se llama i y el evento final se
denomina j. El evento final de una actividad será el
evento inicial de la actividad siguiente.
Las flechas no son vectores,
escalares ni representan medida alguna. No interesa la forma de
las flechas, ya que se dibujarán dé acuerdo con las
necesidades y comodidad de presentación de la red. Pueden
ser horizontales, verticales, ascendentes, descendentes curvas,
rectas, quebradas, etc.
En los casos en que haya necesidad de indicar que una actividad
tiene una interrelación o continuación con otra se
dibujará entre ambas una línea punteada, llamada
liga, que tiene una duración de cero.
La liga puede representar en algunas ocasiones un tiempo de
espera para poder iniciar la actividad siguiente
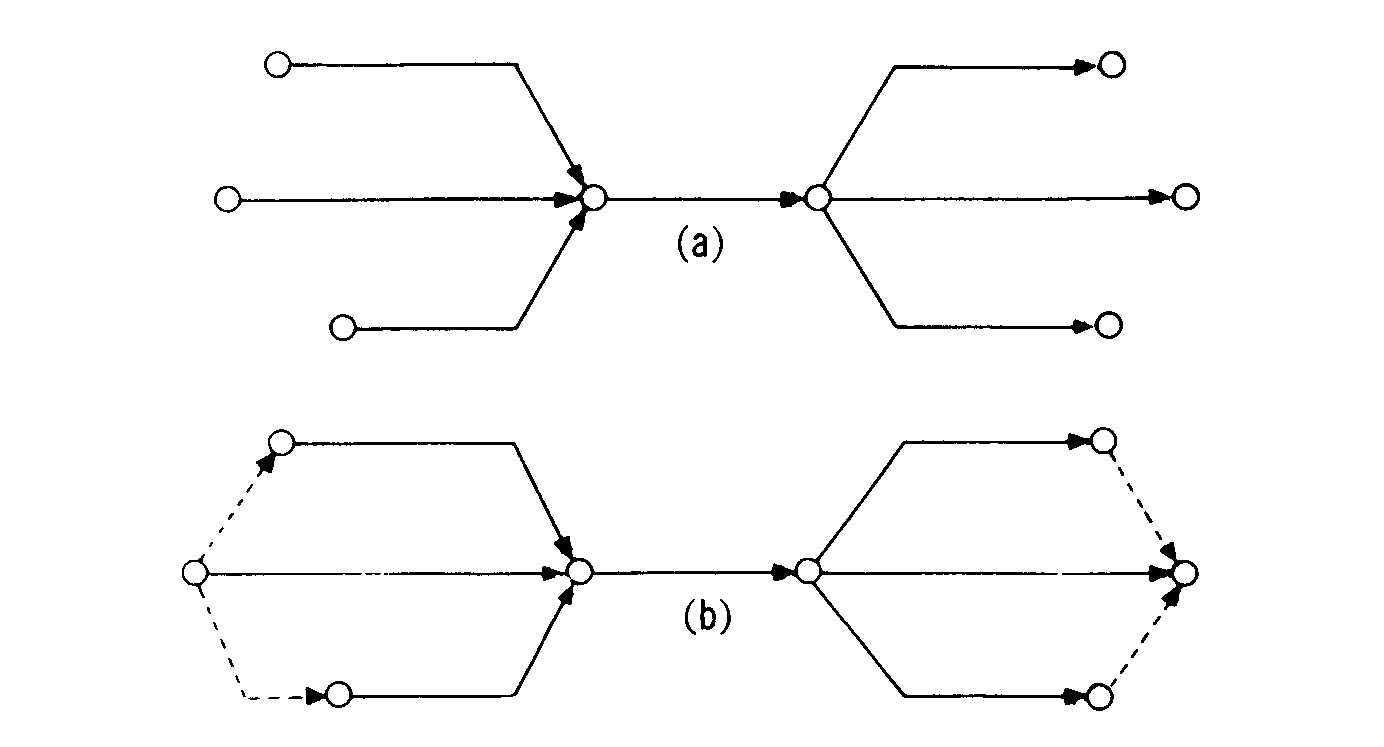
Varias actividades pueden terminar en un evento o partir de un
mismo evento.

(a) Incorrecto, (b) Correcto.
Al construir la red, debe evitarse lo
siguiente:

- Dos actividades que parten de un mismo evento y llegan
a un mismo evento. Esto produce confusión de tiempo y
de continuidad. Debe abrirse el evento inicial o el evento
final en dos eventos y unirlos con una liga.(a) Incorrecto; (b) Correcto.

- Partir una actividad de una parte intermedia de otra
actividad. Toda actividad debe empezar invariablemente en un
evento y terminar en otro. Cuando se presenta este caso, a la
actividad base o inicial se le divide en eventos
basándose en porcentajes y se derivan de ellos las
actividades secundadas. - Dejar eventos sueltos al terminar la red. Todos ellos
deben relacionarse con el evento inicial o con el evento
final.

(a) Incorrecto; (b) Correcto
5. Enfoque de tres
estimaciones de PERT.
Hasta ahora se ha supuesto implícitamente que se
puede obtener estimaciones con una exactitud razonable del tiempo
requerido para cada actividad del proyecto. En la realidad, con
frecuencia existe bastante incertidumbre sobré cuales
serán estos tiempo; de hecho se trata de una variable
aleatoria que tiene cierta distribución de probabilidad.
La versión original de PERT toma en cuenta esta
incertidumbre usando tres tipos diferentes de estimaciones par
los tiempos de las actividades, con el fin de obtener
información basica sobre su distribución de
probabilidad. Esta información para todos los tiempos de
las actividades se utiliza para estimas la probabilidad de
terminar el proyecto en la fecha programada.
Las tres estimaciones empleadas por PERT para cada actividad son
una estimación más probable, una estimación
optimista y una estimación pesimista. La estimación
mas probable (denotada por m ) intenta ser la estimación
mas realista del tiempo que puede consumir una actividad. En
términos estadísticos, es una estimación de
la moda (el punto
mas alto) de la distribución de probabilidad para el
tiempo de la actividad. La estimación optimista (denotada
por a) procura ser el tiempo poco probable pero posible si todo
sale bien; es en esencia una estimación de la cota
inferior de la distribución de la probabilidad. Por
ultimo, se intenta que la estimación pesimista (denotada
por b) sea el tiempo poco probable pero posible si todo sale mal.
En términos estadísticos, se trata en esencia de
una estimación de la cota superior de la
distribución de probabilidad. En la figura 3 se muestra la
localización ideal de estas tres estimaciones con respecto
a la distribución de probabilidad.
Tiempo transcurrido
Figura 3. Modelo de
distribución de probabilidad para loas tiempos de las
actividades en el enfoque de tres estimaciones de PERT: m =
estimación probable, a = estimación optimista y b =
estimación pesimista.
Se hacen dos suposiciones para convertir m, a y b en estimaciones
del valor esperado
( te ) y la variancia (s 2) del tiempo que requiere la
actividad. Una suposición es que s , la desviación
estándar (raíz cuadrada de la variancia), es igual
a un sexto del intervalo de los requerimientos de tiempo
razonablemente posibles; esto es,
![]()
es la estimación deseada de la variancia. El
razonamiento para hacer esta suposición es que se
considera que las colas de muchas distribuciones de probabilidad
(como en la distribución normal) están mas o menos
a tres desviaciones estándar de la media, de manera que
existe una dispersión de alrededor de seis desviaciones
estándar entre las colas, por ejemplo, las cartas de control
que se usan normalmente para el control estadístico de la
calidad
están construidas de manera que la dispersión entre
los limites de control se estima en seis desviaciones
estándar.
Para obtener la estimación del valor esperado (
te ), también es necesaria una
suposición sobre la forma de la distribución de
probabilidad, se supone que la distribución es ( al menos
aproximadamente) una distribución beta. Este tipo de
distribución tiene la forma que se muestra en la figura 3,
que es razonable para este propósito.
Si se usa el modelo ilustrado en la figura 3 el valor esperado
del tiempo de una actividad es aproximadamente ![]()
Nótese que el medio del intervalo (a + b)/ 2 se
encuentra entre a y b de manera que te es la media
aritmética ponderada de la moda y la mitad del intervalo,
con un peso de dos tercios para la moda. Aunque la
suposición de una distribución beta es arbitraria,
sirve para el propósito de localizar el valor esperado a
m, a y b de una manera que parece ser razonable.
Después de calcular el valor esperado y la variancia
estimados para cada una de las actividades, se necesitan tres
suposiciones adicionales (o aproximaciones) para poder calcular
la probabilidad de terminar el proyecto a tiempo. Una es que los
tiempos de las actividades son estadísticamente
independientes. Una segunda es que la ruta critica ( en
términos de los tiempos esperado) siempre requiere un
tiempo total mayor que cualquier otra ruta. Esto implica que el
valor esperado y la variancia, es sencillo encontrar la
probabilidad de que esta variable aleatoria normal ( tiempo del
proyecto) sea menor que el tiempo de terminación
programado.
6. Método CPM
para trueques entre tiempo y costo
Las versiones originales de CPM y PERT difieren en dos
aspectos importantes. Primero, el CPM supone que los tiempos de
las actividades son deterministicos ( es decir, se pueden
predecir de manera confiable sin incertidumbre significativa),
por lo que no necesita las tres estimaciones que se acaban de
describir. Segundo, en lugar de dar una importancia primordial al
tiempo (explícitamente), el CPM asigna la misma
importancia al tiempo y al costo y pon esto de relieve al
construir un a curva de tiempo-costo para cada actividad, con la
que se muestra en la figura 4. Esta curva representa la
relación entre el costo directo presupuestado para la
actividad y su tiempo de duración resultante.
Figura 4. Curva tiempo-costo para la actividad (i,j).
Por lo general la grafica se basa en dos puntos: el normal y el
intensivo o de quiebre. El punto normal da el costo y el tiempo
necesario cuando la actividad se realiza en la forma normal, sin
incurrir en costos adicionales (horas extras de mano de obra,
equipo o materiales
especiales para ahorrar tiempo, etc.), Para acelerar la
actividad. Por el contrario, el punto de quiebre proporciona el
tiempo y el costo necesario cuando se realiza la actividad en
forma intensiva o de quiebre, esto es se acelera completamente
sin reparar en costos, con el fin de reducir su tiempo de
duración lo mas que se pueda. Como una
aproximación, se supone entonces que todos los trueques
intermedios entre tiempo y costos son posibles y que se
encuentran sobre el segmento de línea que une a estos dos
puntos. (Obsérvese en el segmento de línea oscuro
en la Fig. 4). Así, las únicas estimaciones que
tienen que obtener el personal del
proyecto son el costo y el tiempo para estos dos puntos.
El objetivo fundamental del CPM es determinar el trueque entre
tiempo y costo que debe emplearse en cada actividad para cumplir
con el tiempo de terminación del proyecto que se programo
a un costo mínimo. Una forma de determinar la
combinación optima del tiempo y costo es aplicar programación
lineal. para descubrir esto, es necesario introducir
notación nueva, parte de la cual se resume en la figura 4.
Sea
Dij = tiempo normal para la actividad (i , j)
CDij = costo (directo) normal para la actividad (i ,
j)
dij = tiempo de quiebre para la actividad (i , j)
Cdij = costo (directo) de quiebre para la actividad (i
, j)
Las variables de
decisión para el problema son xij donde
xij = tiempo de duración de la actividad (i ,
j)
Entonces existe una varible de decisión
xij para cada actividad, pero no lo hay par alos
valores de i y
j que no tienen una actividad correspondiente.
Para expresar el costo directo de la actividad ( i, j) como una
función
(lineal) de Xjj denótese la pendiente de la
línea que pasa por los puntos normal y de quiebre para la
actividad (i , j) por
![]()
tambien definase Kij como la
intersección con el eje del costo directo de esta linea,
com se muestra en la fig. 4, por tanto,
costo directo de la actividad (i , j) = Kij +
Sij xij,
en consecuencia,
costo directo total del proyecto = ![]()
en donde la sumatoria se extiende sobre todas las actividades (i
, j). Ahora se puede establecer y formular matemáticamente
el problema.
El problema: dado un tiempo T (máximo) de
terminación del proyecto, selecciónese la
xjj que minimice el costo directo total del
proyecto.
Formulación De Programación Lineal. Para tomar en
cuenta el tiempo de terminación del proyecto en la
formulación de programación lineal del problema, se
necesita una variable más para cada evento. Esta variable
adicional es
yk = tiempo más próximo (desconocido) para el
evento k, el cual es una función determinística de
Xij.
Cada yk es una variable auxiliar, es decir, una variable que se
introduce al modelo por ser conveniente en la formulación
y que no representa una decisión. El método
simplex trata a las variables auxiliares igual que a las
variables de decisión (xij ) normales.
Para ver cómo se introducen las yk a la
formulación, considérese el evento 7 de la figura 1
Por definición, su tiempo más próximo
es:
y7 = máx {y4 + x47,
y5 + x57},
En otras palabras y7 es la cantidad más
pequeña tal que las dos restricciones siguientes se
cumplen:
y4 + x47 <
y7
y5 + x45 <
y7,
por lo que estas dos restricciones se pueden incorporar
directamente a la formulación de programación
lineal (después de pasar y7 al lado izquierdo
para obtener la forma apropiada). Aún más, adelante
se verá por qué la solución óptima
que se obtiene con el método simples para el modelo
completo hará de manera automática que el valor de
y7 sea la cantidad más pequeña que
,satisface estas restricciones, por lo que no se necesitan
más restricciones para incorporar la definición de
y7 al modelo.
Dentro del proceso e incorporación de estas restricciones
para todos los eventos, se tiene que cada variable xij
aparecerá en exactamente una restricción de este
tipo,
![]()
que se puede expresar en la forma apropiada
como
![]()
Para continuar con los preparativos para escribir el
modelo completo de programación lineal, se etiquetan
Evento 1 = inicio del proyecto
Evento n = terminación del proyecto,
con lo que
![]() =0
=0
![]() = tiempo
= tiempo
de terminación. .
Nótese también que ![]() es una constante fija que
es una constante fija que
puede eliminarse de la función objetivo, de manera que
minimizar el costo directo total para el proyecto es equivalente
a maximizar ![]() Por
Por
tanto, el problema de programación lineal es encontrar las
![]() (y las
(y las ![]() correspondientes) tales
correspondientes) tales
que
Maximizar ![]()
Sujeta a:
![]()
![]() Para
Para
todas las actividades (i , j)
![]()
![]()
Desde un punto de vista computacional, este modelo se
puede mejorar algo al sustituir todas las ![]() por
por
![]()
en todo el modelo, para que el primer conjunto de
restricciones funcionales (![]() ) se sustituya por las restricciones de no
) se sustituya por las restricciones de no
negatividad
![]()
Es conveniente también introducir restricciones
de no negatividad para el resto de las variables:
![]()
aunque estas variables ya estaban forzadas a ser no
negativas al establecer y1 = 0, debido a
las restricciones ![]() y
y ![]()
Una propiedad
interesante de una solución óptima para este modelo
es que (en circunstancias normales) toda trayectoria de la red
será una ruta crítica que requiere un tiempo T, La
razón es que una solución de este tipo satisface
las restricciones ![]() mientras que evita los costos adicionales en que se incurre
mientras que evita los costos adicionales en que se incurre
por acortar el tiempo de cualquier trayectoria.
La clave de esta formulación es la manera en que
se introducen las ![]() al modelo mediante las restricciones
al modelo mediante las restricciones ![]() , con el fin de
, con el fin de
proporcionar los tiempos más próximos para los
respectivos eventos (dados los valores de
las ![]() en la
en la
solución básica factible actual). Como los tiempos
más próximos se tienen que obtener en orden, todas
estas ![]() son
son
necesarias nada más para obtener finalmente el valor
correcto de ![]() (para
(para
los valores actuales de las ![]() ), reforzando así la restricción
), reforzando así la restricción
![]() . Sin embargo,
. Sin embargo,
obtener el valor correcto requiere que el valor de cada ![]() (incluso el de
(incluso el de ![]() ) sea la cantidad
) sea la cantidad
más pequeña que satisface todas las restricciones
![]() . Ahora se
. Ahora se
hará una descripción breve de por qué (en
circunstancias normales) esta propiedad se cumple para una
solución óptima.
Considérese una solución para las
variables ![]() tal que
tal que
toda trayectoria de la red es crítica y requiere un tiempo
T. Si los valores de las ![]() satisfacen la propiedad anterior, entonces las
satisfacen la propiedad anterior, entonces las
![]() son los
son los
verdaderos tiempos más pr6ximos con ![]() exactamente y la
exactamente y la
solución completa para las ![]() y
y ![]() satisface todas las restricciones. Sin embargo, si alguna
satisface todas las restricciones. Sin embargo, si alguna
![]() se hace un poco
se hace un poco
más grande, esto crearía una reacción en
cadena en la que alguna ![]() se tendría que hacer un poco más grande
se tendría que hacer un poco más grande
para satisfacer todavía las restricciones ![]() etc., hasta que en
etc., hasta que en
última instancia, ![]() deba hacerse un poco más grande y se viole la
deba hacerse un poco más grande y se viole la
restricción![]() . La única manera de evitar esto con una
. La única manera de evitar esto con una ![]() un poco más grande,
un poco más grande,
es hacer que los tiempos de duración de algunas
actividades (posteriores al evento i) sean un poco más
pequeñas, aumentando con esto el costo. Por lo tanto, una
solución óptima evitará que las ![]() sean más grandes de
sean más grandes de
lo necesario para satisfacer las restricciones ![]() .
.
El problema, como se estableció aquí,
supone que se ha fijado una fecha de entrega específica T
(tal vez por contrato) para la
terminación del proyecto. En realidad, algunos proyectos
no tienen una fecha de entrega, en cuyo caso no está claro
el valor que debe asignarse a T en la formulación de
programación lineal. En este tipo de situaciones, la
decisión sobre T (que resulta ser la duración del
proyecto en la solución óptima), de hecho depende
de cuál es el mejor trueque entre el costo total y el
tiempo total del proyecto.
La información básica que se necesita para tomar
esta decisión es cómo cambia el costo directo total
mínimo al cambiar el valor de T en la formulación
anterior, como se muestra en la figura 5. Esta información
se puede obtener cuando se usa progranlflci6n lineal parametrica
para obtener la solución óptima como una funci6n de
T en todo el intervalo. Existen procedimientos aún
más eficientes, para obtener esta información, que
explotan la estructura
especial del problema.
La figura 5 proporciona una base útil para la toma de
decisiones del administrador sobre el valor de T (y la
solución óptima correspondiente para![]() ) cuando los efectos
) cuando los efectos
importantes de la duración del proyecto (distintos a los
costos directos) son en esencia intangible. Ahora bien, cuando
estos otros efectos que son básicamente financieros
(costos indirectos ), es apropiado combinar la curva del costo
directo total de la figura 5 con una curva de costo indirecto
total mínimo (supervisión, instalaciones, intereses,
multas contractuales) contra t, como se muestra en la figura 6.
La suma de estas curvas proporcionará la curva del costo
total mínimo del proyecto para distintos valores de T. El
valor óptimo de T será entonces aquél que
minimice esta curva de costo
total.
7. Elección entre PERT y CPM
La elección entre el enfoque de las tres
estimaciones de PERTy el método de trueques entre el
tiempo y el costo del CPM depende fundamentalmente del tipo de
proyecto y de los objetivos
gerenciales. El PERT es en particular apropiado cuando se maneja
mucha incertidumbre al predecir los tiempos de las actividades y
cuando es importante controlar de una manera efectiva la
programación del proyecto; por ejemplo, la mayor parte de
los proyectos de
investigación y desarrollo caen dentro de esta
categoría. Por otro lado, el CPM resulta muy apropiado
cuando se pueden predecir bien los tiempos de las actividades
(quizá con base en la experiencia) y cuando estos tiempos
se pueden ajustar con facilidad (por ejemplo, si se cambian
tamaños de brigadas), al igual que cuando es importante
planear una combinación apropiada entre el tiempo y el
costo del proyecto. Este último tipo lo representan muchos
proyectos de construcción y mantenimiento.
En la actualidad, las diferencias entre las versiones actuales de
PERT y CPM no son tan marcadas como se han descrito. Muchas
versiones de PERT permiten emplear una sola estimación (la
más probable) para cada actividad y omiten así la
investigación probabilística. Una
versión llamada PERT/Costo considera también
combinaciones de tiempo y costo en forma parecida al
CPM.
8. Diferencias Entre PERT y
CPM
La diferencia entre PERT y CPM es la manera en que se
realizan los estimados de tiempo. E1 PERT supone que el tiempo
para realizar cada una de las actividades es una variable
aleatoria descrita por una distribución de probabilidad.
E1 CPM por otra parte, infiere que los tiempos de las actividades
se conocen en forma determinísticas y se puede variar
cambiando el nivel de recursos utilizados.
La distribución de tiempo que supone el PERT para una
actividad es una distribución beta. La distribución
para cualquier actividad se define por tres estimados:
- el estimado de tiempo más probable,
m; - el estimado de tiempo más optimista, a;
y - el estimado de tiempo más pesimista,
b.
La forma de la distribución se muestra en la
siguiente Figura. E1 tiempo más probable es el tiempo
requerido para completar la actividad bajo condiciones normales.
Los tiempos optimistas y pesimistas proporcionan una medida de la
incertidumbre inherente en la actividad, incluyendo desperfectos
en el equipo, disponibilidad de mano de obra, retardo en los
materiales y otros factores.

Con la distribución definida, la media (esperada)
y la desviación estándar, respectivamente, del
tiempo de la actividad para la actividad Z puede calcularse por
medio de las fórmulas de aproximación.

El tiempo esperado de finalización de un proyecto
es la suma de todos los tiempos esperados de las actividades
sobre la ruta crítica. De modo similar, suponiendo que las
distribuciones de los tiempos de las actividades son
independientes (realísticamente, una suposición
fuertemente cuestionable), la varianza del proyecto es la suma de
las varianzas de las actividades en la ruta crítica. Estas
propiedades se demostrarán posteriormente.
En CPM solamente se requiere un estimado de tiempo. Todos los
cálculos se hacen con la suposición de que los
tiempos de actividad se conocen. A medida que el proyecto avanza,
estos estimados se utilizan para controlar y monitorear el
progreso. Si ocurre algún retardo en el proyecto, se hacen
esfuerzos por lograr que el proyecto quede de nuevo en programa
cambiando la asignación de recursos.
- Frederick S. Hillier, Gerald J. Lieberman; Introducción ala Investigación de
Operaciones, Quinta edición, Edit. McGraw Hill, México 1993. - http://www.gestiopolis.com
Autor:
Julio Cesar Silva Cruz