
Sistema de control de Datos Discretos.
El muestreador es un mecanismo que entrega un tren de pulsos cuya amplitud corresponde a los valores de la señal análoga a muestrear en el instante que se produce el muestreo.
(Gp:) Muestreador
(Gp:) Filtro
(Gp:) Proceso Controlado

Señal de entrada continua al muestreador
t
0
e(t)
t
0
e(t)
Salida discreta del muestreador
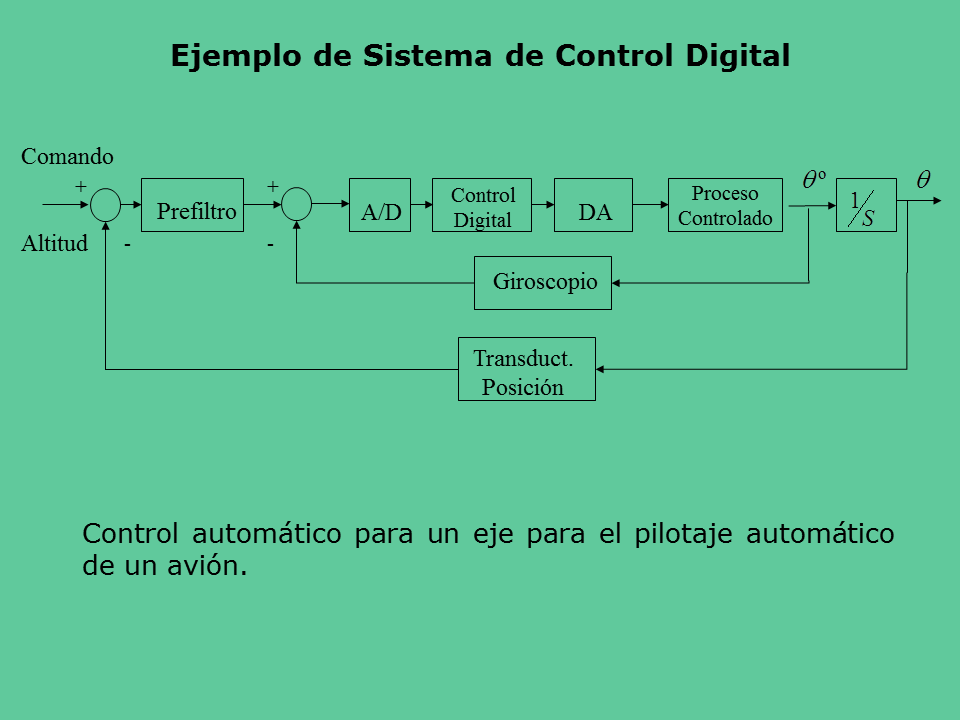
Ejemplo de Sistema de Control Digital
Prefiltro
Proceso Controlado
A/D
Control Digital
DA
+
–
+
–
Control automático para un eje para el pilotaje automático de un avión.
Giroscopio
Transduct. Posición
Comando
Altitud

Prefiltro
Proceso Controlado
A/D
Control Digital
DA
+
–
Sistema con muestreo múltiple
Los muestreadores adquieren muestras de la señal con frecuencia constante, se cumple un periodo de muestreo.
Los retenedores mantienen el valor de la señal retenida hasta que llega un nuevo valor correspondiente a una nueva muestra.
Giroscopio
TX Posición
Retenedor
Retenedor
Comando
Altitud

La Bucla Típica de Control Realimentada
Computador Digital
Actuador
DA
+
–
Sensor
A / D
Reloj
Planta Proceso

Tratamiento (Data Login):
Recoger la máxima información sobre el funcionamiento del proceso.
Medición de variables y parámetros.
Pretratamiento: – Normalizar
– Convertir unidades
– Linealizar parámetros
Procesamiento: – Cálculos
– Análisis estadística
– Almacenamiento en dispositivos
– Presentación en plantilla o impresora
Funciones de un Computador de Proceso

Supervisión: – Alarmas: verificar el correcto funcionamiento del proceso – aviso de falla.
– Asistencia: facilitar las operaciones normales del operador.
– Indicación de acciones a ejecutar.
Presentación: entrega información importante para la toma de decisiones en la operación de mando y control.
CUANTIZACIÓN: En el proceso de conversión A / D o el proceso de representar una señal en un número finito de estados discretos, la precisión depende del # de bits de la palabra de cuantización.

Muestra
Cuantización en tiempo
Codificación
Cuantización en amplitud
Se define un nivel de cuantización Q que corresponde a la distancia entre dos niveles adyacentes de decisión.
n = # de bits de la palabra de cuantización.
El error de redondeo es:
X = señal análoga.
Xq = señal digital


El teorema del muestreo especifica que una señal de tiempo continua con componentes de frecuencia hasta WC rad/seg, teóricamente puede ser reconstruida sin distorsión si se muestrea a una velocidad mayor de 2WC rad/seg.
En procesos con constantes de tiempo mayores se podrá utilizar un tiempo de muestreo más grande.
Debe tenerse en cuenta:
El equipo de medida: se recomienda diseñarlos con una Wcorte = ancho de banda de red cerrada.
El rechazo a las perturbaciones: Se recomiendan frecuencias de muestreo entre 5 y 20 veces el ancho de banda de la respuesta al ruido en red abierta. En la medida en que se exijan tiempo de muestreo más altos, se requiere de conversores y microprocesadores más rápidos.
Selección del Periodo de Muestreo.

La calidad del control: Generalmente disminuye con periodos de muestreos largos.
Muestrear entre 8 y 10 veces durante el ciclo de oscilación amortiguada en la señal, si el sistema es sub-amortiguado.
Muestrear de 8 a 10 veces la frecuencia del ancho de banda de red cerrada, el límite inferior teórico es 2.
Muestrear de 8 a 10 veces durante el tiempo de subida si es sobreamortiguado.

Tipos de Señales
Señal de Tiempo Continuo:
(a)
(b)
Es una señal que tiene valores para todo instante de tiempo.
Señal Análoga:
Es una señal de tiempo continuo con un rango continuo de valores.

Señal de Tiempo Discreto:
Es una señal definida solamente en instantes del tiempo generalmente iguales.
Señal de datos muestreados
Señal Digital
Si la amplitud asume un rango continuo de valores se denomina señal de datos muestreado. Si los posibles valores están registrados a un conjunto de valores se denomina señal digital.

Muestreo y Cuantificación
Existen varios tipos de muestreo:
Muestreo Periódico: es el más usual, los instantes de muestreo están igualmente espaciados cada T segundos, sea
T = KT, T: es el periodo de muestreo, con K =0,1,2,3,…
Muestreo de Orden Múltiple: El patrón de tK`s se repite periódicamente: tK + r- tK = constante, para todo tK.
Muestreo Múltiple: Sistemas de múltiples lazos que debido a la dinámica de cada lazo requieren diferentes periodos de muestreo.
Muestreo Aleatorio: La variable tK es una variable aleatoria.

Tipos de Sistemas
De acuerdo al tipo de señal:
Sistema Análogo:
Si sólo existen en él señales análogas se describen mediante ecuaciones diferenciales.
Sistema de Tiempo Discreto:
Si sólo existen en él señales discretas, se describen mediante Ecuaciones de diferencias.
Sistema de Datos Muestreados:
Tienen señales discretas (pulsos de amplitud modulada) y señales de tiempo continuo
Sistema Digital:
Si incluye señales de tiempo continuo y señales digitales en forma de código numérico.

Sistemas Discretos:
Es el que procesa secuencia, es decir recibe una secuencia y entrega otra, la cual corresponde a una frecuencia preestablecida de la secuencia de entrada.
Secuencia de salida = f (secuencia de entrada)
En bloque funcional:
Los sistemas discretos se clasifican en:
Estática
Dinámicos
Causales
No causales
SISTEMA
DISCRETO
Página siguiente  |