13
Motores paso a paso: Tipos de steppers
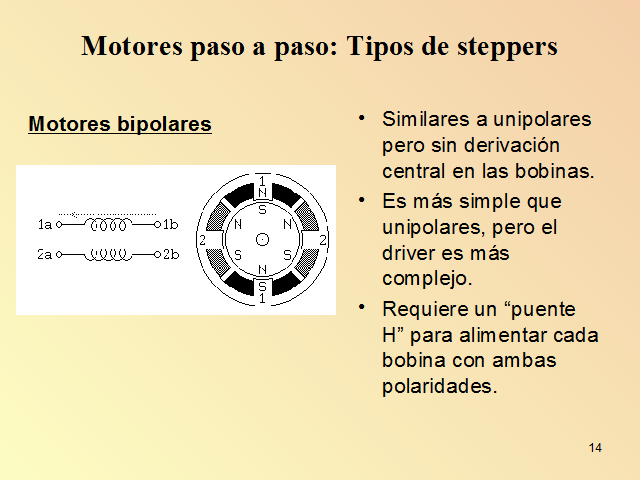
Similares a unipolares pero sin derivación central en las bobinas.
Es más simple que unipolares, pero el driver es más complejo.
Requiere un “puente H” para alimentar cada bobina con ambas polaridades.
Motores bipolares

14
Motores paso a paso: Control de steppers
Una unidad de control (no representada) provee las señales necesarias para abrir y cerrar las llaves con la secuencia apropiada para posicionar el motor o hacerlo girar. Puede ser una computadora con soft adecuado.
Circuito de control para un stepper de reluctancia variable
Se requiere una llave por cada bobina (transistor).
Como las cargas son inductivas, hay que agregar diodos de “damping” en paralelo para proteger los transistores.

15
Motores paso a paso: Control de steppers
Como en el caso anterior, cada cuadro representa una llave electrónica.
Circuito de control para steppers unipolares e híbridos
Como la corriente circula en 2 sentidos por cada semibobina, se requieren 2 diodos por cada una.

16
Motores paso a paso: Control de steppers
Circuito de control para steppers bipolares: puente H
En este tipo de circuitos hay que ser cuidadoso con el control para no cortocircuitar la fuente! (p.ej. al cerrar A y B simultáneamente).
Para evitar cortocircuitar la fuente:

17
Motores paso a paso: Circuitos de drivers prácticos
Cada llave es compatible con una entrada TTL.
Los 5 V para la lógica, incluyendo la del driver open collector 7407 debe estar bien regulada.
El SK3180 es un Darlington con ganancia de corriente = 1000.
El IRL540 puede manejar hasta 20 A, soportando tensiones inversas de hasta 100 V.
Para motores unipolares y de reluctancia variable.
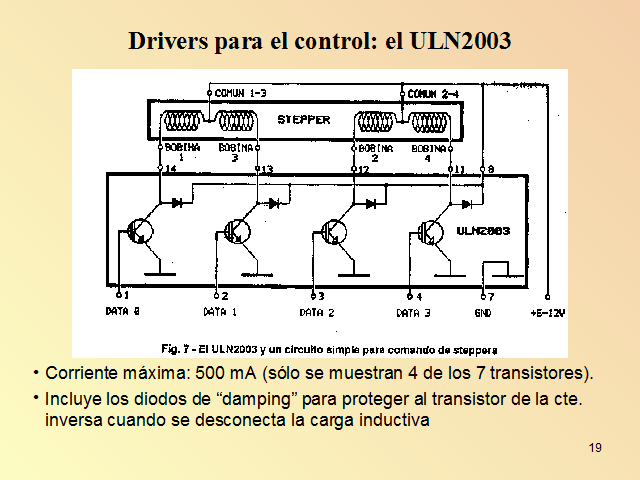
El ULN2003, circuito comercial con 7 transistores Darlington con entradas compatibles con TTL, c/u protegido con 2 diodos ( protegen contra tensiones inversas y picos inductivos).
18
Drivers para el control: el ULN2003
Corriente máxima: 500 mA (sólo se muestran 4 de los 7 transistores).
Incluye los diodos de “damping” para proteger al transistor de la cte. inversa cuando se desconecta la carga inductiva

19
Motores paso a paso: Circuitos de drivers prácticos
Para motores bipolares y puentes H
Las entradas X e Y pueden controlarse con drivers TTL open collector.
Conocidos como puente H.
Para energizar la bobina, sólo con X alto e Y bajo o viceversa.
Para cargas y tensiones pequeñas puede usarse un tri-state TTL tipo LS244 como semipuente.

20
Motores paso a paso: Circuitos de drivers comerciales
Circuito “puente H” comercial
El L293 contiene 2 puentes H (puente H dual).
La versión L293D es igual pero incluye los diodos de protección.
Permiten manejar steppers bipolares de hasta 1 A por bobina y 36 V.

21
Motores paso a paso: Circuitos de drivers comerciales: L298
Para cargas mayores (hasta 2 A) puede usarse el L298, también puente H dual.

22
Motores paso a paso: Circuitos de drivers comerciales: L298
Para corrientes mayores (4 A) pueden conectarse ambos puentes en paralelo:
23
Motores paso a paso: Drivers
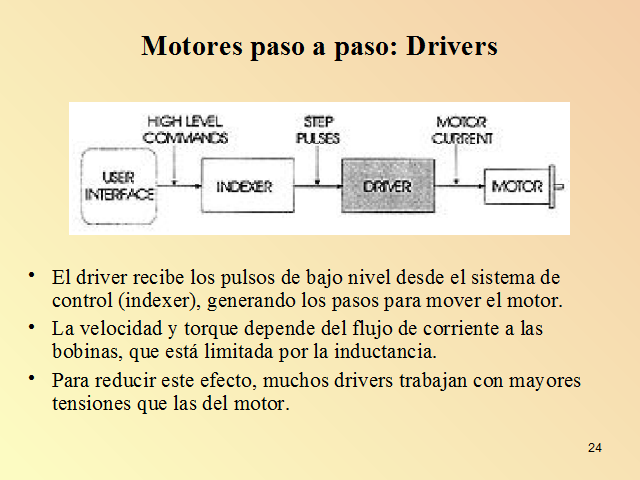
El driver recibe los pulsos de bajo nivel desde el sistema de control (indexer), generando los pasos para mover el motor.
La velocidad y torque depende del flujo de corriente a las bobinas, que está limitada por la inductancia.
Para reducir este efecto, muchos drivers trabajan con mayores tensiones que las del motor.

24
Motores paso a paso: Indexer o controlador
Provee la cantidad de pasos y dirección de giro al driver.
A veces incluye otros parámetros como aceleración, desaceleración, pasos por segundo.
Los basados en microprocesador pueden funcionar stand-alone o controlados por una computadora vía RS232. En nuestro ejemplo se hace por el pto. paralelo.
25
Motores paso a paso: Circuito controlador + driver
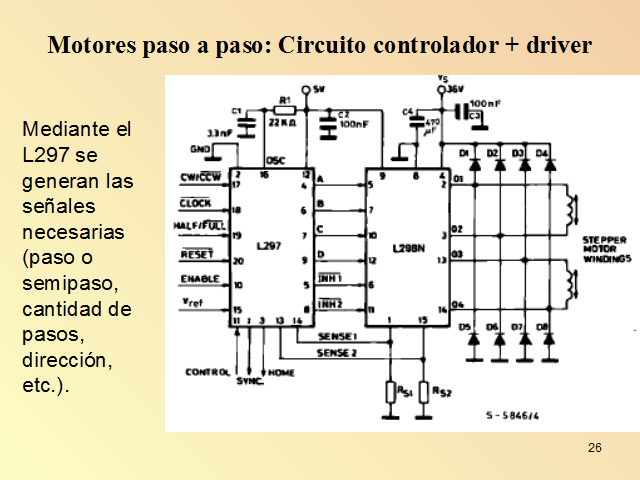
Mediante el L297 se generan las señales necesarias (paso o semipaso, cantidad de pasos, dirección, etc.).
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |