
1
Motores paso a paso: Características
Similares a los motores de corriente continua.
Diferencia principal: se usan más para posicionamiento electromecánico.
Otras diferencias:
la conmutación de polos es externa;
nº polos grande, paso pequeño ->precisión en movimientos
nº de polos variable (relacionado con nº pasos necesario para completar una vuelta)
2
Motores paso a paso: Especificaciones
Tensión de operación
Resistencia de los arrollamientos
nº de pasos por revolución (o ángulo de cada paso)
Torque o cupla disponible
Velocidad máxima de operación
Otros: peso, cte. máxima/bobina, etc.
Resolución: número de pasos para completar una vuelta (mayor cantidad de pasos, mayor resolución).

3
Motores paso a paso: Funcionamiento
2 arrollamientos excitados: posición estable, S y N, N y S enfrentados.
1 arrollamiento excitado: posición estable, N y S enfrentados. El rotor giró ½ paso.
2 arrollamientos excitados: posición estable (similar a la inicial). El rotor giró 1 paso.

4
Motores paso a paso: Control
Secuencia de accionamiento 2-2 (2 arrollamientos consecutivos siempre activos).
Cada fase de esta secuencia avanza el stepper un paso.
Recorriendo la secuencia inversa, gira al revés.

5
Motores paso a paso: Control
Secuencia de accionamiento1-2 (alternativamente 1 y 2 arrollamientos energizados).
Cada fase avanza el stepper ½ paso.
6
Motores paso a paso: Tipos de steppers
Existen 3 tipos básicos:
De reluctancia variable
De imán permanente
Híbridos
Se diferencian por el tipo de construcción (uso o no de imanes permanentes en el rotor y estatores de acero laminado).
7
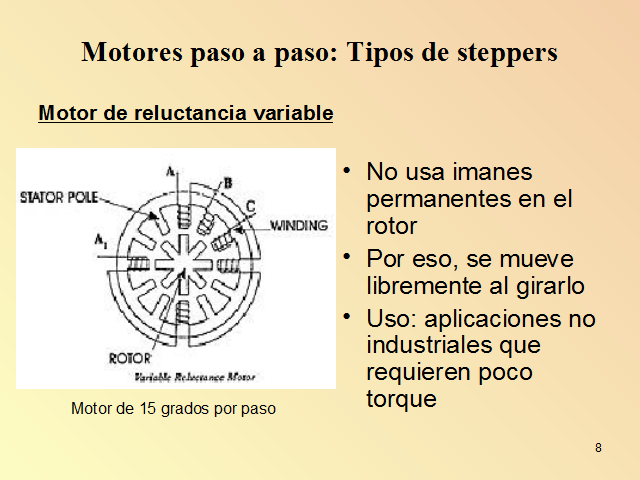
Motores paso a paso: Tipos de steppers
No usa imanes permanentes en el rotor
Por eso, se mueve libremente al girarlo
Uso: aplicaciones no industriales que requieren poco torque
Motor de reluctancia variable
Motor de 15 grados por paso

8
Motores paso a paso: Tipos de steppers
Usualmente tienen 3 (a veces 4) bobinados, con un retorno común.
El stepper de la figura tiene 4 “dientes” en el rotor y 6 polos en el estator.
Motor de reluctancia variable
9
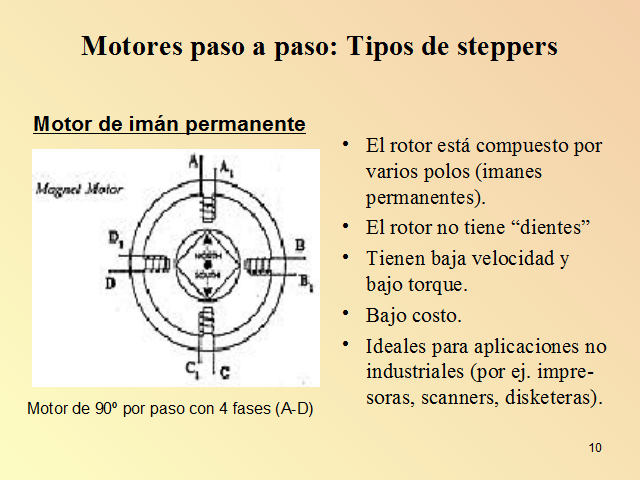
Motores paso a paso: Tipos de steppers
El rotor está compuesto por varios polos (imanes permanentes).
El rotor no tiene “dientes”
Tienen baja velocidad y bajo torque.
Bajo costo.
Ideales para aplicaciones no industriales (por ej. impre-soras, scanners, disketeras).
Motor de imán permanente
Motor de 90º por paso con 4 fases (A-D)

10
Motores paso a paso: Tipos de steppers
Combina las mejores características de los anteriores.
Tienen muchos polos en el rotor (p.ej. 200).
Tienen altas resoluciones (hasta < 1º).
Tienen gran torque.
Son más caros.
Ideales para aplicaciones industriales (p.ej. robots).
Motor híbrido

11
Motores paso a paso: Tipos de steppers
Tienen 5 o 6 terminales, con una derivación en el centro de cada bobina.
Los puntos medios(1 y 2) se conectan a c.c. y los terminales (a y b) a masa alternativamente.
Motores unipolares
El rotor de la figura es un magneto de 6 polos.
Cada arrollamiento o bobina está distribuido entre 2 polos en el estator.

12
Motores paso a paso: Conexión de las bobinas
Página siguiente  |