
1
Estimación de Parámetros en tiempo real
La estimación de parámetros de un proceso es un elemento clave en el Control Adaptativo.

2
Estructuras presentes en el Control Adaptativo
Una forma de estructura de estimación de parámetros se realiza implícitamente, típicamente encontrado en los modelos de referencia de sistemas adaptativos (MRAS).
Éstos intentan alcanzar para una señal de entrada definida, un comportamiento en lazo cerrado dado por un modelo de referencia.

3
Estructuras presentes en el Control Adaptativo
La otra forma de estructura de estimación de parámetros de un proceso es un bloque explícito (bloque de estimación), típicamente encontrado en los reguladores auto-entonados (STR).
Éstos tratan de alcanzar un control óptimo, sujeto a un tipo de controlador y a obtener información del proceso y sus señales.
4
Elementos para la Identificación de Sistemas
Los elementos clave para la identificación de los parámetros de un sistema son:
Estudio experimental (adquisición de datos).
Formulación de un criterio.
Seleccionar la estructura del modelo.
La estimación de parámetros.
La validación de estos parámetros estimados.

5
Estimación de Parámetros en tiempo real
Seleccionar una señal de entrada requiere experiencia y conocimiento del tipo de proceso a controlar.
En el Control Adaptativo los parámetros del proceso cambian continuamente, por ello es necesario que los métodos de estimación actualicen los parámetros recursivamente.
6
Método de Mínimos Cuadrados para la Estimación de Parámetros
Este método es particularmente sencillo si el modelo posee la propiedad de ser “lineal en los parámetros”.
Formulado por Karl Friedrich Gauss a finales del siglo XVIII. Su principio se basaba en que los parámetros de un modelo matemático deben ser escogidos de manera tal que la suma de los cuadrados de las diferencias entre los valores actuales observados y calculados del modelo, multiplicados por coeficientes que miden el grado de precisión, sea un mínimo.
7
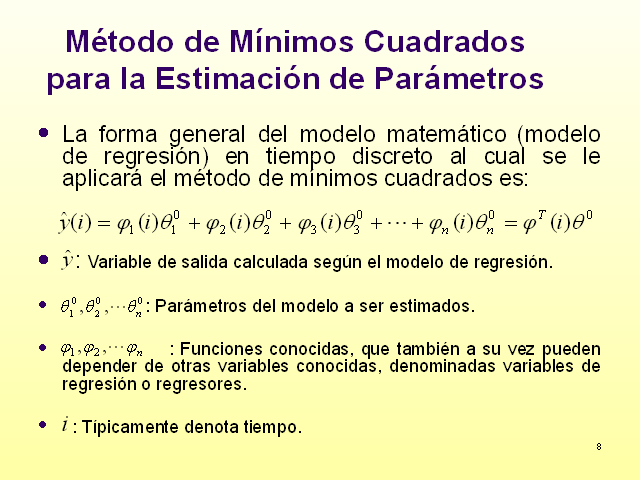
Método de Mínimos Cuadrados para la Estimación de Parámetros
La forma general del modelo matemático (modelo de regresión) en tiempo discreto al cual se le aplicará el método de mínimos cuadrados es:
: Variable de salida calculada según el modelo de regresión.
: Parámetros del modelo a ser estimados.
: Funciones conocidas, que también a su vez pueden depender de otras variables conocidas, denominadas variables de regresión o regresores.
: Típicamente denota tiempo.

8
Método de Mínimos Cuadrados para la Estimación de Parámetros
Esta ecuación puede verse también como el producto escalar de dos vectores, de la forma:

9
Método de Mínimos Cuadrados para la Estimación de Parámetros
A través de un experimento se pueden obtener pares ordenados de la variable observada y de regresores, de la forma:
El objetivo es determinar los parámetros del vector de manera que las salidas calculadas en el modelo de regresión concuerden lo más cerca posible con las variables de salida medidas y así minimizar la función de mínimos cuadrados.
para

10
Método de Mínimos Cuadrados para la Estimación de Parámetros
La función de Mínimos Cuadrados se puede expresar de la forma:
Introduciendo las notaciones:

11
Método de Mínimos Cuadrados para la Estimación de Parámetros
Según el Teorema de estimación de los mínimos cuadrados, la función de mínimos cuadrados , es mínima para los parámetros si se cumple que:
Si la matriz es no-singular, el mínimo es único está dado por la ecuación:

12
Interpretación geométrica del Método de Mínimos Cuadrados
Los vectores generan un subespacio de dimensión , un hiperplano en
La salida predecida se encuentra en este hiperplano formado por los vectores
Entonces el error es el más pequeño cuando es ortogonal a este hiperplano.

13
Ejemplo de aplicación del Método de Mínimos Cuadrados
Considerando el sistema:
Donde es un ruido Gaussiano con desviación estándar de 0.1
El sistema se puede escribir de la forma:
La salida se mide 4 veces para 7 diferentes entradas y se obtienen:

14
Ejemplo de aplicación del Método de Mínimos Cuadrados

15
Ejemplo de aplicación del Método de Mínimos Cuadrados
El usuario debe decidir el modelo apropiado a utilizar:

16
Ejemplo de aplicación del Método de Mínimos Cuadrados
Se obtuvieron los siguiente resultados:
En conclusión, con pocos parámetros en el modelo no es posible obtener un buen ajuste de los datos. Si por el contrario, se usan demasiados parámetros el ajuste será muy bueno pero para otro conjunto de datos puede ser muy pobre, es lo que se denomina “Sobreajuste”.

17
Método de Mínimos Cuadrados en tiempo continuo
En muchas aplicaciones es necesario realizar observaciones en tiempo continuo.
La ecuación del modelo de regresión nuevamente se utiliza pero ahora asumiendo una variable real continua.
La novedad se presenta al introducir en la nueva función de Mínimos Cuadrados en tiempo continuo un factor exponencial con un “parámetro de olvido”.
La ecuación es de la forma:

18
Método de Mínimos Cuadrados en tiempo continuo
Se utiliza el mismo principio, es decir, determinar los parámetros del vector de manera que las salidas calculadas en el modelo de regresión concuerden lo más cerca posible con las variables de salida medidas y así minimizar la función de mínimos cuadrados.
El estimado en único si la matriz es invertible, con:

19
Método de Mínimos Cuadrados en tiempo continuo
Según el Teorema de estimación de los mínimos cuadrados, asumiendo que la matriz es invertible para todo t, se debe satisfacer:
Con la matriz:

20
Estimación de Parámetros en tiempo real usando Matlab
El Toolbox de Identificación de Sistemas de Matlab posee una interfaz gráfica que contiene la mayoría de las funciones de esta Toolbox, tipeando “ident” se inicia esta interfaz.

21
Estimación de Parámetros en tiempo real usando Matlab
El comando de estimación general en Matlab es:
MODEL = PEM(DATA,MODELSTRUCTURE)

22
Estimación de Parámetros en tiempo real usando Matlab
DATA: Es la información o datos estimados en el formato de objeto IDDATA.
DATA = IDDATA(Outputs,Inputs,SamplingInterval)
Se pueden seleccionar porciones de esta DATA, por ejemplo: DATA(1:200).
Outputs e Inputs son matrices de NxNy, con N siendo el número de datos y Ny el número de canales de salida.

23
Estimación de Parámetros en tiempo real usando Matlab
MODELSTRUCTURE: Es una variable que define la estructura del modelo.
IOBB: Para modelos entrada/salida discretos de una sola salida.
SSBB: Para modelos en espacio de estados multisalida en tiempo discreto.
SSCT: Para modelos en tiempo continuo.
SSSTRUC: Para modelos en espacio de estados con estructura interna definida por el usuario, tanto en tiempo discreto como tiempo continuo.

24
Estimación de Parámetros en tiempo real usando Matlab
Los modelos estimados son evaluados con el comando:
COMPARE(DATA,MODEL)
Este comando compara la salida del modelo medido en DATA con la respuesta del modelo.
STEP(MODEL), IMPULSE(MODEL): Grafican la respuesta ante un escalón o un impulso del modelo.
BODE(MODEL), NYQUIST(MODEL): Grafican el diagrama de Bode o de Nyquist.
PZMAP(MODEL): Grafica los polos y ceros del modelo.

25
Estimación de Parámetros en tiempo real usando Matlab
present (MODEL): Muestra detalles del modelo.
get (MODEL): Muestra una lista completa de las propiedades del modelo.
MODEL = arx(Data,[na nb nk]): Estima los parámetros y del modelo ARX, el cual es de la forma:
Más explícitamente:

26
Estimación de Parámetros en tiempo real usando Matlab
Donde na, nb, nk, corresponden a los órdenes y retardos que definen la estructura exacta del modelo.
MODEL = ar(t,na): Estima los parámetros del modelo AR, el cual es de la forma:
El cual se utiliza para una señal de salida sencilla