
(Gp:) Para mantener el Tp constante el producto tiene que permanecer constante, asi que
decimos que la parte imaginaria debe de permanecer constante
(Gp:) Para mantener el %OS constante hay que mantener la razón de tiene que
permanecer constante (factor de amortiguamiento constante).
Para mantener Ts constante hay que mantener la parte real de los polos constante
Aumento en la frecuencia de la respuesta
Tiempo de crecimiento y tiempo de pico menores
Se manteiene la envoltura exponencial (generada por la parte real)
El tiempo de establecimiento se mantiene constante
Aumenta el %OS
El %OS se mantiene constante
Tiempo de pico, de subida y de establecimiento varían.
(menor tiempo a medida que los polos se alejan del origen)
La frecuencia de la respuesta permanece igual
Tiempo de crecimiento y tiempo de pico se mantienen constantes
El tiempo de establecimiento aumenta
Varía el %OS, (aumenta)
A medida que los polos se alejan del eje imaginario,
la respuesta se hace menos oscilatoria
(Gp:) s
(Gp:) jwd
(Gp:) 0
(Gp:) s
(Gp:) jwd
(Gp:) s
(Gp:) jwd
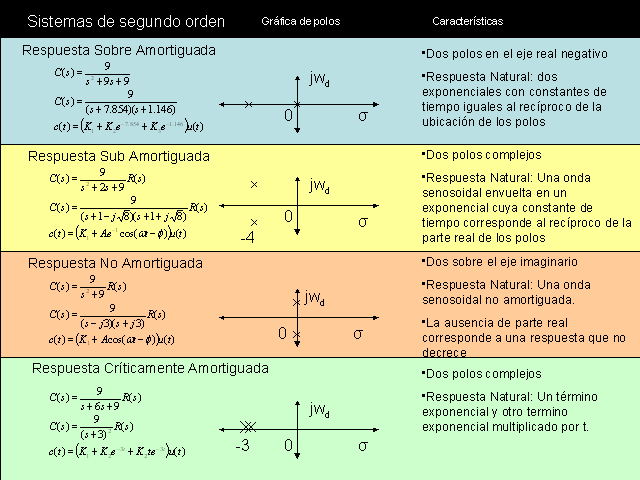
Respuesta Sobre Amortiguada
(Gp:) 0
(Gp:) s
(Gp:) jwd
Respuesta Sub Amortiguada
(Gp:) -4
(Gp:) 0
(Gp:) s
(Gp:) jwd
Respuesta No Amortiguada
(Gp:) 0
(Gp:) s
(Gp:) jwd
Respuesta Críticamente Amortiguada
(Gp:) -3
(Gp:) 0
(Gp:) s
(Gp:) jwd
Sistemas de segundo orden
Dos polos en el eje real negativo
Respuesta Natural: dos exponenciales con constantes de tiempo iguales al recíproco de la ubicación de los polos
Dos polos complejos
Respuesta Natural: Una onda senosoidal envuelta en un exponencial cuya constante de tiempo corresponde al recíproco de la parte real de los polos
Dos sobre el eje imaginario
Respuesta Natural: Una onda senosoidal no amortiguada.
La ausencia de parte real corresponde a una respuesta que no decrece
Dos polos complejos
Respuesta Natural: Un término exponencial y otro termino exponencial multiplicado por t.
Gráfica de polos Características

Naturaleza:
Sobre amortiguado
Polos: S1,2= -3, -6
Ceros: no tiene
Naturaleza:
Sobre amortiguado
Polos: s1,2= -10, -20
Cero: s = -7
Naturaleza:
NO Amortiguado
Polos: s1,2= j3, -j3
Ceros: s = -2
Naturaleza
Sobre amortiguado
Polos: s1,2= -10, -10
Ceros: s = -5
Problema 4.8
(Gp:) Naturaleza:
Sub amortiguado
Polos: s1,2=
Ceros: no tiene

Aproximación de sistemas a segundo orden
Los polos dominantes son los que se encuentran más cerca del origen.
Si un sistemas tiene polos adicionales y estos se encuentran diez veces más
lejos del origen que los polos dominantes, entonces se puede despreciar su efecto
para así aproximar el sistema a uno de segundo orden.
X 8
20 1.2
veinte es más de diez veces mayor que 1.2

20pts
Problema del segundo examen
Determine el por ciento de rebase para el siguiente sistema de
lazo cerrado cuando se le alimenta un salto unitario a la entrada
Queremos ver si podemos eliminar este polo
Buscamos la ecuación característica para la aproximación
de esta ecuación obtenemos que:
El polo adicional está en s = -20 así que como es más de diez veces mayor,
este sistema se puede aproximar a uno de segundo orden.
Las gráficas son más o menos así
(Gp:) percent overshoot
(Gp:) 50%
(Gp:) 2

Segunda prueba corta
Dado un sistema de lazo abierto con un tiempo de establecimiento de un segundo y un por ciento de rebase desconocido, con un factor de amortiguamiento de 0.707 y con una entrada de salto unitario:
a) determine la función de transferencia cuando ess = 0
Para un sistema de segundo orden
1pt

Problema 4.20
Para cada uno de los sistemas de segundo orden encuentre el valor del factor de amortiguamiento, tiempo de subida, tiempo de establecimiento, tiempo pico y por ciento de rebase.

Derivaciones
Buscando ? con %OS
Buscando ? con Ts y Tp
Sacamos el logaritmo de la ecuación
Cuadramos

Problema 4.23
Para los siguientes sistemas de segundo orden encuentre la localización del par de polos
%OS = 12% y TS = 0.6 seg
%OS = 17% y TP = 0.5 seg
TP = 7 seg y TS = 3 seg
Los polos están dados por
(Gp:) Para el a) buscamos ? con la formula conocida
dada por el %OS
(Gp:) buscamos ?n con la formula conocida dada por TS
(Gp:) Para el b) buscamos ? con la formula conocida
dada por el %OS
(Gp:) buscamos ?n con la formula conocida dada por TP
(Gp:) Para el c) buscamos ? con la formula conocida
dada por TP y TS
(Gp:) buscamos ?n con la formula conocida dada por TP o por TS

Teorema del Valor Final
Teorema: lim f(t) existe si y solo si todos los polos de
F(s) tienen parte real negativa con la exepción de un
polo simple en s = 0.
Es decir, todos los polos estan en el lado izquierdo del plano complejo con la Posible exepción de un polo simple en s = 0.
Ejemplo:
Sea
Note que:
Sin embargo,
Esta es una función de
Naturaleza oscilatoria
O sea NO CONVERGE
A ningun valor.
Otro ejemplo
Determine f(t) y discuta si el Teorema del Valor final aplica o no.
Si
existe
Entonces
Sea
Sin embargo,
Otro ejemplo
Sea
El teorema no se puede aplicar aquí

Teorema del Valor Inicial
Si f(t) no tiene descontinuidades infinitas en t=0
Entonces, lim f(t) cuando t tiende a cero por la
Derecha es igual al lim F(s) cuando s tiende a
Infinito
La inversa de la transformada de Laplace mediante
Expansión en fracciones parciales. El método de
Expansión en fracciones parciales aplica únicamente
A funciones racionales en “s” que sean estricatamente
Propias.
Si
existe
Entonces
Ej:
Es impropia dado que el grado del numerador
es mayor que el del denominador.

Funciones estrictamente propias con polos reales y distintos

F(s) tiene polos reales y algunos están repetidos
No se puede hacer esto
Método de los residuos de Heavyside
0

Respuesta de sistemas con ceros
La respuesta del sistema consta de dos partes: la
derivada de la respuesta original y u escalamiento de la respuesta original dada por aC(s)
Si a es muy grande, la respuesta se puede aproximar al término aC(s)
Si a no es muy grande, la respuesta tendrá un término derivativo que contribuye a la respuesta
Para valores pequeños de a podemos esperar %OS más grandes
Para ceros en el semiplano derecho, la respuesta seguirá inicialmente al término derivativo en dirección opuesta al escalado por a, resultando en un pico negativo

Dado por el cero en el semiplano positivo
Este sistema se denomina “non minimum-phase system
Sistema superior con un cero
No es muy pequeño comparado con los otros residuos
Este término no se puede despreciar para aproximarlo a un sistema de segundo orden
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |