Elementos de un Sistema de Control Digital Planta Dispositivos de
entrada Dispositivos de salida Tareas de salida Tareas de entrada
Tareas de control Tareas de comunicación Interfaz de
comunicaciones Dispositivos de comunicaciones : teclados,
monitores, LAN

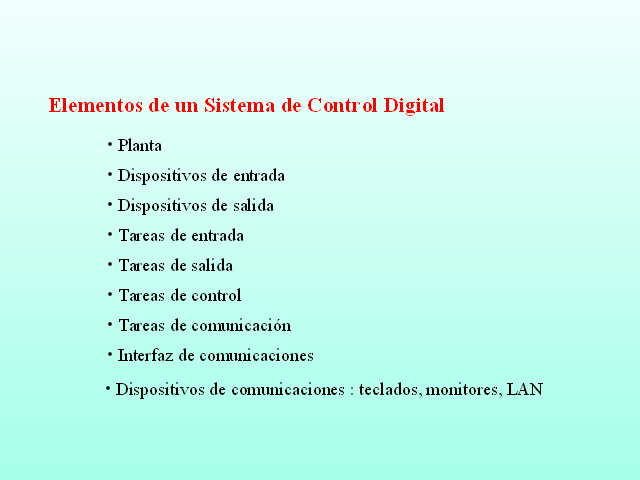
(Gp:) Pantalla (Gp:) Teclado (Gp:) LAN (Gp:) Impresora (Gp:)
Dispositivos de comunicación (Gp:) Interface de
comunicaciones (Gp:) Computador (Gp:) Tareas de control (Gp:)
Tareas de comunicaciones (Gp:) Imagen de entrada (Gp:) Imagen de
salida (Gp:) Tareas de entrada (Gp:) Tareas de salida (Gp:)
Dispositivos de entrada (Gp:) Dispositivos de salida (Gp:)
Proceso (Gp:) Proceso (Gp:) Proceso (Gp:) Planta Elementos de un
Sistema de Control Digital

Sistemas de tiempo real Primer computador operando en tiempo real
=> documento por Brown y Campbell, en 1950 La
aplicación de computadores al control industrial
comenzó en los 50’s Primera instalación
industrial de un sistema computarizado se realizó en
setiembre de 1958, por parte de la Louisiana Power and Light
Company, USA. El primer sistema de control a lazo cerrado por
computador fue hecho por la Texaco Company , en Texas, USA. Se ha
tenido un gran incremento y mejoras en el uso de computadores
digitales en el ámbito industrial: El HW (procesadores,
memorias) , el SW (lenguajes, aplicaciones), los costos han
disminuido.

Definición de Tiempo Real El autor J. E. Cooling lo define
como: Son sistemas en los cuales debe producirse la respuesta
correcta en un espacio definido de tiempo. Si la respuesta del
computador excede ese espacio de tiempo, entonces se
obtendrá una degradación del desempeño o un
mal funcionamiento. Clasificación de los Sistemas de
Tiempo Real Sistemas periódicos ó basados en un
reloj Sistemas basados en eventos Sistemas interactivos 1. Tiempo
real duro ( hard real-time) 2. Tiempo real suave ( soft
real-time)

Clasificación de los Programas 1. Programación
Secuencial. Las acciones se ordenan en una estricta secuencia
Acción => instrucción, comando o
declaración Programa => serie de instrucciones en
ejecución secuencial Ejemplo típico es el lenguaje
BASIC de hace algunos años. 2. Programación
Multitarea. Programa constituido por procesos o tareas, paralelos
Los procesos se comunican a través de variables comunes o
señales de sincronización. Por ejemplo, el Windows
utiliza programación multitarea. 3. Programación en
Tiempo real. La secuencia de sus acciones son determinadas por el
medio ambiente en el que trabaja el sistema. Ejemplos: Modula 2,
Ada, FORTH, LabVIEW.

Conceptos sobre Control por Computadora 1. Proceso por lotes (o
batch). Un ejemplo de un proceso en lotes es la producción
de crema dental 2. Proceso continuo. Ejemplos del mismo son la
producción del papel y del cemento. 3. Procesos de
laboratorio o de prueba. El computador es utilizado para
controlar cierto experimento complejo. Clasificación de
los procesos

* Adquisición de datos * Control secuencial * Lazos de
Control Digital Directo * Control supervisor * Análisis de
datos * Almacenamiento de datos * Interfaz hombre-máquina
Actividades que se desarrollan por parte del sistema de
control:

* Eficiencia en la operación * Facilidad de
operación * Seguridad * Producto de mayor calidad *
Reducción del desperdicio * Reducción del impacto
ambiental debido a la producción * Reducción del
tiempo de producción * Control Secuencial Los objetivos
que se persiguen al usar un computador:

En un lazo de Control Digital Directo el computador se encuentra
dentro del bucle de control. Ventajas sobre el control
analógico: * menor costo * mejor desempeño (mayores
rangos de ajuste y precisión) * mayor seguridad (menos
propensos a fallos). Algoritmos de control más utilizados:
* PID * Sistemas inteligentes de control (sistemas expertos,
lógica difusa, redes neuronales, etc.) Otras
técnicas incluyen: control inferencial, control por
adelanto de la señal (feedforward control) y el control
adaptivo. Lazos de Control Digital Directo

Control inferencial (Gp:) Variables Manipuladas (Gp:) Disturbios
(Gp:) Variables medibles usadas para estimar las no medibles
(Gp:) Salidas medibles Variables controladas (Gp:) Estimador
(Gp:) Set points (Gp:) Controlador (Gp:) Salidas no medibles
Variables controladas (Gp:) Estimación de las salidas no
medibles. Variables controladas (Gp:) Proceso

Control por adelanto de la señal (Gp:) Disturbios (Gp:)
Set Point (Gp:) Medición (Gp:) Controlador (Gp:) Proceso
(Gp:) Salidas no medibles (Gp:) Salidas medibles

Control adaptivo (Gp:) Set Point (Gp:) Ajuste de
Parámetros (Gp:) Estimador de Parámetros (Gp:)
Proceso (Gp:) Controlador (Gp:) Variable manipulada (Gp:)
Variable controlada PID comerciales con auto-sintonía: en
forma periódica el controlador inyecta un pequeño
disturbio y mide la respuesta. Esta respuesta es comparada con la
respuesta deseada y los parámetros del controlador se
ajustan para que la respuesta del proceso se ajuste a la
deseada.

Control Supervisor (Gp:) Set Points (Gp:) Equipo de
supervisión (Gp:) Proceso (Gp:) Variables medidas (Gp:)
Variables de salida (Gp:) C (Gp:) C (Gp:) C

Sistemas Jerárquicos (Gp:) Nivel bajo Múltiples
centros de decisión (Gp:) Nivel superior Centro de
decisión unico (Gp:) Largo (Gp:) Nivel intermedio (Gp:)
Corto Las tareas son divididas de acuerdo a la función que
ejecutan

Sistemas Distribuidos => Muchos computadores trabajan en
paralelo * Cada unidad realiza esencialmente las mismas tareas
que las demás * En el caso de falla ó de sobrecarga
de una unidad en particular, todo o parte de su trabajo puede ser
transferido a otras unidades Interfaz Hombre-Máquina
Mostrar fácilmente el estado de la planta en un momento
dado Facilidades de modificacar de set-points, de reconocimiento
de alarmas De producir reportes, gráficos e informes
estadísticos Información económica;
facilidades para el ingeniero de planta; etc. Sus
características principales son: Se debe proveer en las
facilidades a los operadores y usuarios del mismo.

El Ingeniero de Control 1. Definir la estrategia apropiada de
control para alcanzar los requerimientos del sistema 2. Definir
las variables a medir, manipular y controlar, y establecer las
constantes de escala, filtrado, puntos de alarmas, intervalos de
muestreo, etc. 3. Definir los controladores a utilizar y las
conexiones con los otros elementos del sistema 4. Sintonizar o
ajustar los controladores de acuerdo a la especificación
escogida 5. Definir y programar los procedimientos de control
secuencial necesarios para la operación de la planta 6.
Determinar e implementar el esquema de control supervisor que se
requiera Responsabilidades de un ingeniero de control:

Variantes de los sistemas de medición y control * Unidades
convencionales: Sensores, transmisores de señal,
controladores, etc. Cada instrumento es un dispositivo distinto.
* Sistemas modulares: Equipos con microcontroladores para
realizar funciones específicas de medición y
control: PLC. Tarjetas insertables o módulos * Sistemas de
control distribuido (DCS): Diseñados para aplicaciones de
tamaño mediano a grandes. Diversidad de equipos conectados
en red, como son: – acondicionadores de señal, unidades de
control – consolas de trabajo, monitores de despliegue de
información – impresoras, etc. (Sistemas generalmente muy
costosos).

Distintas posibilidades de conexión de un sistema
automatizado

* Utilizar sistemas operativos (SO) y lenguajes estándar:
Menor costo, mayor tiempo de proyección y menor
confiabilidad. Hay que realizar las propias funciones para el
trabajo en tiempo real: – reprogramar el servicio de
interrupción de tiempo de la máquina – establecer
prioridades, manejo de recursos, etc. Para sistemas
pequeños en tiempo real puede utilizarse esta variante. *
SO de tiempo real y lenguajes con bibliotecas para tiempo real:
Costo medio Ejemplo: LabVIEW, LabWindows sobre windows.
Flexibilidad para realizar aplicaciones a la medida. * Sistemas
específicos para medición y control: Con ellos se
logra una rápida implementación. Alto costo. Por
ejemplo: Lookout, Intouch, RSVIEW. Variantes en la
programación de un sistema.
Tareas típicas en un sistema de medición y control
1. Adquisición y procesamiento primario de la
información 2. Atención a alarmas, arranque,
paradas, condiciones anormales 3. Regulación (PID) 4.
Cálculos (periódicos o aperiódicos) 5.
Presentación de la información. 6. Atención
al operador (teclado, mouse, etc) 7. Reportes 8. Controles
lógicos secuenciales 9. Comunicación 10.
Optimización, despacho, análisis
técnico-económicos

Esquema simplificado del proceso de la pulpa en una
fábrica de papel (Gp:) Pulpa (Gp:) Agua (Gp:) Nivel (Gp:)
Densidad (Gp:) Regulación (Gp:) Nivel

Variable medida Tipo Objetivo Nivel mínimo de la pulpa
on-off Alarma, bloqueo Nivel máximo de la pulpa on-off
Alarma, bloqueo entrada de pulpa Nivel mínimo del agua
on-off Alarma, bloqueo Nivel máximo del agua on-off
Alarma, bloqueo entrada de agua Agitador funcionando on-off
Alarma, bloqueo Corriente máxima del agitador on-off
Alarma, bloqueo Nivel analógica Regulación,
indicación, registro, Alarma Densidad analógica
Regulación, indicación, registro, Reporte Flujo de
salida analógica Indicación, reporte

1. Adquisición y procesamiento de las variables
analógicas. Periódicas en dependencia de los
periodos de muestreo, con alta prioridad. 2. Adquisición y
procesamiento de las variables discretas. Periódica, con
bajo periodo de muestreo, o por interrupción en
dependencia del hardware. Máxima prioridad. 3.
Regulación. Periódica, alta prioridad. 4.
Procesamiento de las variables calculadas. Periódicas, con
periodos de muestreo relativamente alto, o a solicitud del
operador por teclado (o mouse) 5. Presentación de la
información. Refrescamiento cada 1 seg.
Presentación de pantallas ( Mímico, Alarmas, etc)
Tareas básicas asociadas al ejemplo anterior:

Ejemplos de software para aplicaciones de medición y
control Características del RSVIEW Sw de medición,
control y monitoreo (Rockwell Software). Drivers para PLC de
Allen Bradley. Sistema operativo Windows. Comunicación
(DDE,OLE, TCP/IP). Gráficas con animación. Trabajo
con Bases de datos.

Características del LOOKOUT * Constituye un software para
la automatización industrial. * Totalmente orientado a
objeto * No existe límite en cuanto a la cantidad de
objetos, paneles, puntos de E/S que puede gobernar * Permanece
On-line mientras se agrega algún objeto a la
aplicación. * Incluye una amplia biblioteca de
gráficos, no obstante se pueden crear sus propios
gráficos. * Admite files: Windows metafiles (.WMF), bitmap
(.BMP), AutoCad * Permite intercambio dinámico de datos
(DDE) con otras aplicaciones. * Amplio tratamiento de las alarmas
* 10 niveles de seguridad

* Usa un lenguaje de programación gráfica llamado
"G". * Diseñado para instrumentación,
procesamiento, control, presentación de la
información de forma eficiente. * Consiste en construir
programas denominados Instrumentos Virtuales (VI) por su
similitud con instrumentos reales. * Usa la programación
por flujo de datos. * Velocidad del código compilado
similar al "C". * Multitarea. * Gran cantidad de funciones para
ayudar a la programación. * Biblioteca específica
de aplicaciones para: Adquisición de datos. Control de
instrumentos seriales y con buses GPIB Análisis de datos.
Presentación de la información. Almacenaje de
datos. Características del LabVIEW para Windows:

Características del LabVIEW para Windows: * Funciones
específicas para Generación de señales.
Procesamiento de señales. Filtros. Ventanas.
Estadísticas. Regresión. Algebra lineal. * Manejo
de arreglos. * Controles e indicadores para la
presentación de la información: Gráficos.
Interruptores, indicadores visuales. Tanques, termómetros,
etc.

Características del LabVIEW para Windows: *
Análisis en tiempo real, posee funciones para el trabajo
en tiempo real. * Diferentes posibilidades para la
comunicación con el exterior, uso de puertos, drivers en
DDL, comunicación serie, enlace con redes, protocolo
TCT/IP para la comunicación en redes, etc. * LabVIEW posee
VIs para controlar instrumentos a través de los buses
GPIB, VXI, RS232. Posee "drivers" para más de 150
interfaces de 40 fabricantes. * Oferta drivers para la
comunicación con diferentes PLCs. * Programación
modular y jerárquica. Cada VI confeccionado puede
así mismo ser una función de otra
aplicación. * Posibilidad del uso de intercambio
dinámico de datos DDE. * Posibilidad de uso de objetos de
otras aplicaciones a través de OLE.

* Manejo de base de datos, posibilidades de uso de SQL. *
Fácil, su puesta a punto. * En el LabVIEW se promueve el
concepto de programación modular. Características
del LabVIEW para Windows:

* Consiste en posibilitar la ejecución de una
instrucción en cuanto sus operandos estén
disponibles * La inicialización de las instrucciones
depende de la disponibilidad de los datos * Cada elemento,
llamado nodo, consiste de: operador, los receptores de operandos
y los destinos de los resultados. * La regla de disparo de un
nodo exige que todos los receptores estén ocupados por los
valores, o sea, que todos los datos de entrada estén
disponibles. * Los programas por flujos de datos se representan
por grafos dirigidos que muestran el flujo de datos entre los
nodos. * No existe el concepto de memoria de datos compartidos
por lo que no se producen efectos colaterales. * La
programación por flujo de datos es apropiada para la
implementación distribuida. Se puede usar en aplicaciones
altamente concurrente. Como desventaja se le sitúa que
tiende a gastar excesivo espacio de memoria. Algunas
características de la programación por flujo de
datos:

Conectividad entre aplicaciones Facilidades de conectividad: *
Atención a puertos de E/S * Comunicación serial. *
Manejo de ficheros. * Enlace dinámico de bibliotecas
(DDL). * Ejecución de comandos del sistema *
Conexión a redes, uso del protocolo TCP/IP. * Uso de
drivers especifico para adquisición de datos (DAQ, GPIB).
* Intercambio dinámico de datos (DDE). * Trabajo con bases
de datos (SQL). * Enlace con objetos (OLE y ActiveX)

1. Atención a Puertos de E/S

2. Comunicación serie

3. Trabajo con ficheros

4. Manejo de DLL

5. Ejecución de comandos del sistema operativo

6. Conexión a redes TCP Listen TCP Open Conection TCP Read
VI TCP Write VI TCP Close Conection Uso del protocolo
TCP/IP:

7. Adquisición de datos * entradas analógicas
simples y múltiples, * salidas analógicas, *
entradas y salidas discretas, * medición de periodo,
frecuencia, * conteo de pulsos, * generación de pulsos, *
calibración, * linealización de termopares, *
lectura de termistores, strain gauge, RTD. Utilización de
tarjetas de adquisición de datos (ISA o PCI) en un
computador Permite leer los valores de variables discretas o
analógicas National Instruments oferta drivers para mas de
150 tarjetas de adquisición de datos de más de 40
firmas. El LabVIEW posee funciones para tratar:

Introducción al LabVIEW