Matrices y Sistemas de Ecuaciones e Inecuaciones
Tema:
Matrices y sistemas de ecuaciones e
inecuaciones
Objetivo General
Dada una ecuación matricial,
emplear operaciones y sus propiedades para despejar de ser
posible, la matriz incógnita.
Objetivo Especifico
Dada una matriz, identificar su dimensión y
los elementos que la conforman, aplicando la notación
correcta.Demostrar propiedades de las operaciones entre
matrices.Dado un conjunto de matrices, realizar de ser
posible, operaciones de suma, multiplicación por un
escalar y producto entre ellas.
Antecedentes
La definición de matriz aparece por primera vez
en el año 1850, introducida por J.J. Sylvester. Sin
embargo, hace más de dos mil años los
matemáticos chinos habían descubierto ya un
método de resolución de sistemas de ecuaciones
lineales y, por lo tanto, empleaban tablas con
números.
El desarrollo inicial de la teoría de matrices se
debe al matemático W. R. Hamilton, en 1853. En 1858,
Arthur Cayley introduce la notación matricial como una
forma abreviada de escribir un sistema de m ecuaciones lineales
con n incógnitas, la misma que fue descrita en su
publicación "Memorias sobre la teoría de
matrices".
Cayley daba la definición de matriz y las
operaciones de suma entre matrices, de la multiplicación
de un número real por una matriz, de la
multiplicación entre matrices y de la inversa de una
matriz. Cayley afirmaba que obtuvo la idea de matriz a
través de la idea del determinante, considerándola
como una forma conveniente para expresar transformaciones
geométricas.
Además de su utilidad para el estudio de sistemas
de ecuaciones, las matrices aparecen de forma natural en
informática, geometría, estadística,
economía, física, logística, etc. Como
ejemplo tenemos en la informática como son tablas
organizadas en filas y columnas: hojas de cálculo, bases
de datos, entre otros.
Justificación
Las matemáticas son una creación de la
mente humana y constituyen una herramienta para entender el mundo
y convivir en él.
La utilización de matrices permite el desarrollo
de habilidades de pensamiento lógico matemático en
los estudiantes y de procesos como el razonamiento, la
resolución y planteamiento de problemas, la
comunicación y la modelación, entre otros, dentro
de un contexto apropiado que dé respuesta a una
multiplicidad de opciones e intereses que permanentemente surgen
y se entrecruzan en el mundo actual.
Las matrices, mucho más de ser una herramienta de
trabajo, también es un modelo a seguir, el cual
podrá ser una guía en el conjunto de operaciones de
sumas, restas, multiplicaciones y divisiones que no solo la
utilizan los estudiantes sino también profesionales que lo
aplican en su vida cotidiana para poder tomar correctas
decisiones.
Por esta razón, se decidió estudiar este
tema, y conocer las posibilidades de descubrir incógnitas,
las mismas que en la vida diaria seria dar solución a los
problemas laborales y personales.
Matrices
MATRIZ
Historia
El origen de las matrices es muy antiguo. Los cuadrados
latinos y los cuadrados mágicos se estudiaron desde hace
mucho tiempo. Un cuadrado mágico, 3 por 3, se registra en
la literatura china hacia el 650 a. C.2
Es larga la historia del uso de las matrices para
resolver ecuaciones lineales. Un importante texto
matemático chino que proviene del año
300 a. C. a 200 a. C., Nueve
capítulos sobre el Arte de las matemáticas
(Jiu Zhang Suan Shu), es el primer ejemplo conocido de
uso del método de matrices para resolver un sistema de
ecuaciones simultáneas.3 En el capítulo
séptimo, "Ni mucho ni poco", el concepto de
determinante apareció por primera vez, dos mil años
antes de su publicación por el matemático
japonés Seki Kowa en 1683 y el matemático
alemán Gottfried Leibniz en 1693.
Definición:
Una matriz es un arreglo bidimensional de números
(llamados entradas de la matriz) ordenados en filas (o renglones)
y columnas, donde una fila es cada una de las líneas
horizontales de la matriz y una columna es cada una de las
líneas verticales.

EJEMPLO:

Igualdad entre matrices
Dos matrices son iguales si tienen las mismas
dimensiones y cada elemento de la primera es igual al elemento de
la segunda que ocupa su misma posición. Es
decir:

Clases de matrices
Matriz Fila
Caso especial de matriz horizontal que posee una sola
fila, de dimensión 1 x n.

Matriz Columna
Caso especial de matriz vertical que posee una sola
columna, de dimensión mx1.
Ejemplo: 
Matriz Rectangular
Es aquella matriz que no es cuadrada, esto es que la
cantidad de filas es diferente de la cantidad de columnas.Puede
ser de dos formas; vertical u horizontal.
Matriz cuadrada
Se dice que una matriz A es cuadrada si tiene el mismo
número de filas que de columnas. Ejemplos de matriz
cuadrada:

Matriz Triangular superior
Se dice que una matriz es triangular superior si todos
los elementos que están por debajo de la diagonal
principal son nulos.

Matriz Triangular inferior
Se dice que una matriz es triangular inferior si todos
los elementos que están por encima de la diagonal
principal son nulos.
Ejemplo:

Matriz Nula o Matriz Cero

Una matriz cero es, al mismo tiempo, matriz
simétrica, antisimétrica, nilpotente y
singular.
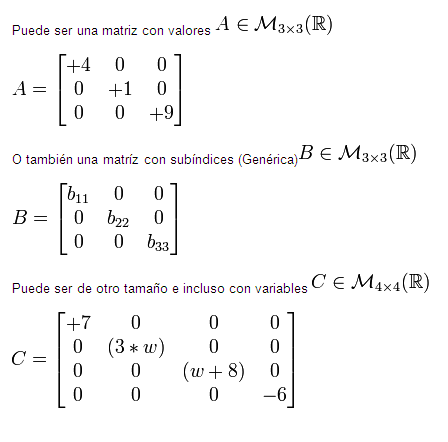
Matriz Diagonal
Se llama diagonal principal de una matriz A a la
diagonal formada por los elementos aii.
Matriz diagonal, matriz cuadrada donde sus
elementos

La matriz identidad es una matriz diagonal.
Una matriz diagonal es una matriz cuadrada en que las entradas o
valores son todos nulas salvo en la diagonal principal, y
éstos incluso pueden ser nulos o no. Otra forma de decirlo
es que es diagonal si todos sus elementos son nulos salvo algunos
de la diagonal principal.
Ejemplos de matrices Diagonales:
Matriz Escalonada
Es toda matriz en la que el número
de ceros que precede al primer elemento no nulo, de cada fila o
de cada columna, es mayor que el de la precedente.Puede ser
escalonada por filas o escalonada por columnas.
Matriz Identidad
Se llama matriz identidad de orden n y se
nota In a una matriz cuadrada de orden n en la que los elementos
de la diagonal principal son 1 y el resto 0.

La matriz identidad puede ser de cualquier
tamaño, siempre y cuando sea cuadrada.
Operaciones con
matrices
Suma entre Matrices
(Guamanzara, 1994)Si las matrices A=(aij) y
B=(bij) tienen la misma dimensión, la matriz suma
es:
A+B=(aij+bij)
La matriz suma se obtiene sumando los elementos
de las dos matrices que ocupan la misma (Matematicas
Particulares)posición.
EJEMPLO:

Propiedades de la Suma de Matrices

EJEMPLO:
Encuentre (A + B) + C –
Asociativa

Encuentre A + (B + C):

Multiplicación de una Matriz por un
escalar
(Ditutor, 2007)Dada una matriz A=(aij) y un
número real k  R, se define la multiplicación de un
R, se define la multiplicación de un
número real por una matriz a la matriz del mismo orden que
A, en la que cada elemento está multiplicado por
k.
k · A=(k aij)
EJEMPLO:

(Wikibooks) Propiedades del producto de una matriz
por un escalar

Multiplicación entre Matrices
(Thales de Milato, 2008)Dos matrices A y B son
multiplicables si el número de columnas de A coincide con
el número de filas de B.

El elemento cij de la matriz producto se obtiene
multiplicando cada elemento de la fila i de la matriz A
por cada elemento de la columna j de la matriz B y
sumándolos.
EJEMPLO:

Propiedades de la Multiplicación
Matricial
Asociativa
A · (B · C) =
(A · B) · C
Distributiva
A · (B + C) =
A · B + A · C
(A + B) C = A · C +
B · C
Transposición de una matriz

Propiedades de la Transposición de
Matrices

Una matriz que posee inversa se dice que es regular,
caso contrario, se dice que es singular.
La matriz inversa, en caso de existir, es
única.
Propiedades de la inversa de una
matriz

Determinantes
Teorema 5.1

(Universidad de Americas, 2006)Tal como se dijo
anteriormente y luego de estudiar el concepto de determinante,
nos proponemos ahora encontrar la inversa de una matriz por el
método de los cofactores.
Teorema 5.2

Cálculo de los determinantes por el
método de cofactores
(Baldor, 2003)
Propiedades

EJERCICIO:

Sistemas de Ecuaciones Lineales
Definición: Un sistema de m ecuaciones
lineales con n incógnitas, es un conjunto de m igualdades
que se pueden escribir en la forma

• Coeficientes: aij para i = 1, 2, ·
· · , m; j = 1, 2, · · · ,
n
• Términos independientes: bi para i = 1, 2,
· · · , m,
• Incógnitas del sistema: x1, x2, ·
· · , xn
(Morales, págs. 7-9)En el caso particular de que
b1 = b2 = · · · = bm = 0 el sistema se
denomina homogéneo. Un sistema de ecuaciones se dice
compatible si tiene alguna solución, es decir, si existen
escalares x1, . . . , xn ? IK verificando las m ecuaciones que lo
componen. En otro caso se dice incompatible. Cuando el sistema es
compatible, se dice además que es determinado si la
solución es única e indeterminado si existe
más de una solución.

Representación matricial de un sistema de
ecuaciones lineales
Un sistema arbitrario
de m ecuaciones
con n incógnitas se puede escribir
como:

Representación de un sistema de ecuaciones
lineales en forma de matriz aumentada

Matrices aumentadas. Si mentalmente se ubica
a los signos +, las letras x y los signos =,
entonces un sistema de m ecuaciones lineales
con n incógnitas puede abreviarse al
escribir sólo el arreglo rectangular de
números.
Este arreglo se denomina matriz aumentada del
sistema.
Como se mencionó en apartados anteriores, el
método básico para resolver un sistema de
ecuaciones lineales es sustituir el sistema dado por un nuevo
sistema que tenga el mismo conjunto de solución, pero que
sea más fácil de resolver. Ello se puede obtener
escalonando la matriz, usando operaciones elementales de
renglón. Ejemplo
Resolver el sistema:

Solución.
En la columna de la izquierda, que se muestra a
continuación, se va a resolver el sistema mediante
operaciones elementales. En la columna de la derecha, el mismo
sistema se resuelve operando sobre los renglones de la matriz
aumentada.

Hay que notar que la anterior matriz está en
forma escalonada. Si se sigue con el proceso se tiene:

La anterior matriz se encuentra en forma escalonada
reducida.
Sistema de Ecuaciones Lineales
Homogéneos
Ecuaciones lineales homogéneas: Ecuaciones
lineales homogéneas de primer
orden
Consideramos la ecuación

Llamamos a esta sucesión progresión
geométrica de valor inicial C y razón A.
Solución de un Sistema de Ecuaciones
Lineales
(Unizar, 1999)Resolver un sistema de ecuaciones es
hallar todas sus soluciones. Para resolver un sistema de
ecuaciones lineales hay que hacer transformaciones en las
ecuaciones hasta que todas las incógnitas queden
despejadas. Estas transformaciones convierten nuestro sistema
inicial en otros sistemas con aspecto distinto y más
fácil de resolver teniendo las mismas soluciones (Sistemas
equivalentes)
La ecuación 2x-3=0 se llama ecuación
lineal de una variable. Obviamente solo tiene una
solución
La ecuación -3x+2y=7 se llama ecuación
lineal de dos variables. Sus soluciones son pares ordenados de
números. Tiene infinitas soluciones que se obtienen
despejando una variable y dando valores cualesquiera a la
otra
La ecuación x-2y+5z=1 se llama ecuación
lineal de tres variables. Sus solucioens son ternas ordenadas de
números, tiene infinitas soluciones que se obtienen
despejando una variable y dando valores cuales quiera a las otras
dos.
Método de Gauss
(Carrasco, 2012)El método de Gauss consiste en
transformar un sistema de ecuaciones en otro equivalente de forma
que éste sea escalonado.
Obtenemos sistemas equivalentes por eliminación
de ecuaciones dependientes. Si:
Todos los coeficientes son ceros.
Dos filas son iguales.
Una fila es proporcional a otra.
Una fila es combinación lineal de
otras.Criterios de equivalencia de sistemas de
ecuaciones
1º Si a ambos miembros de una ecuación de un
sistema se les suma o se les resta una misma expresión, el
sistema resultante es equivalente.
2º Si multiplicamos o dividimos ambos miembros de
las ecuaciones de un sistema por un número distinto de
cero, el sistema resultante es equivalente.
3º Si sumamos o restamos a una ecuación de
un sistema otra ecuación del mismo sistema, el sistema
resultante es equivalente al dado.
4º Sin en un sistema se sustituye una
ecuación por otra que resulte de sumar las dos ecuaciones
del sistema previamente multiplicadas o divididas por
números no nulos, resulta otro sistema equivalente al
primero.
5º Si en un sistema se cambia el orden de las
ecuaciones o el orden de las incógnitas, resulta otro
sistema equivalente.
1El método de Gauss consiste en utilizar el
método de reducción de manera que en cada
ecuación tengamos una incógnita menos que en la
ecuación precedente.
1º Ponemos como primera ecuación la que
tenga el como coeficiente de x: 1 ó -1, en caso de que no
fuera posible lo haremos con y o z, cambiando el orden de las
incógnitas.
2º Hacemos reducción con la 1ª y
2ª ecuación, para eliminar el término en x de
la 2ª ecuación. Después ponemos como segunda
ecuación el resultado de la operación:
E'2 = E2 – 3E1
3º Hacemos lo mismo con la ecuación 1ª
y 3ª ecuación, para eliminar el término en
x.
E'3 = E3 – 5E1
4º Tomamos las ecuaciones 2ª y 3ª,
trasformadas, para hacer reducción y eliminar el
término en y.
E''3 = E'3 – 2E'2
5º Obtenemos el sistema equivalente
escalonado.
6º Encontrar las soluciones.
z = 1
– y + 4 · 1 = -2 y = 6
x + 6 -1 = 1 x = -4
Método de Gauss-Jordan
(Ditutor, 2003)Como trabajo final para el
régimen de promoción de la
asignatura Matemática I, desarrollaré a
continuación esta monografía referida a
la resolución de sistemas por
el método de Gauss- Jordan.
Luego de buscar y seleccionar
la información referida al tema, y de realizar
un repaso general acerca del
tema matrices y ecuaciones lineales, me
encuentro en condiciones de realizar este trabajo acorde a los
requisitos que la cátedra propuso durante todo el cursado
de la materia.
El Método de Gauss – Jordan o
también llamado eliminación de Gauss –
Jordan, es un método por el cual pueden resolverse
sistemas de ecuaciones lineales con n números
de variables, encontrar matrices y matrices inversas, en
este caso desarrollaremos la primera aplicación
mencionada.
Para resolver sistemas de ecuaciones lineales aplicando
este método, se debe en primer lugar anotar los
coeficientes de las variables del sistema de ecuaciones
lineales en su notación matricial:

Entonces, anotando como matriz (también
llamada matriz aumentada):

Una vez hecho esto, a continuación se procede a
convertir dicha matriz en una matriz identidad, es decir una
matriz equivalente a la original, la cual es de la
forma:

Esto se logra aplicando a las distintas filas y columnas
de las matrices simples operaciones de suma, resta,
multiplicación y división; teniendo en cuenta que
una operación se aplicara a todos los elementos de la fila
o de la columna, sea el caso.
Obsérvese que en dicha matriz identidad no
aparecen los términos independientes, esto se debe a que
cuando nuestra matriz original alcance la forma de la matriz
identidad, dichos términos resultaran ser la
solución del sistema y verificaran
la igualdad para cada una de las variables,
correspondiéndose de la siguiente forma:
d1 = x
d2 = y
d3 = z
Ahora que están sentadas las bases, podemos
explicar paso a paso la resolución de sistemas de
ecuaciones lineales por medio de este método.
Para ilustrarnos mejor lo analizaremos con un
ejemplo concreto:
Sea el sistema de ecuaciones:

Procedemos al primer paso para encontrar su
solución, anotarlo en su forma matricial:

Una vez hecho esto podemos empezar a operar con las
distintas filas y columnas de la matriz para transformarla en
su matriz identidad, teniendo siempre en cuenta la forma de
la misma:

Lo primero que debemos hacer es transformar el 2 de
la 1ª fila de la matriz original en el 1 de la 1ª
fila de la matriz identidad; para hacer esto debemos
multiplicar toda la 1ª fila por el inverso de 2, es
decir ½.

Luego debemos obtener los dos ceros de la primera
columna de la matriz identidad, para lograr esto, buscamos el
opuesto de los números que se ubicaron por debajo del
1 de la primera columna, en este caso el opuesto de 3 que
será -3 y el opuesto de 5 que será
-5.
Una vez hecho esto, se procederá a multiplicar
los opuestos de estos números por cada uno de los elemento
de la 1ª fila y estos se sumaran a los números de su
respectiva columna. Por ej.: en el caso de la 2º fila, se
multiplicara a -3 (opuesto de 3) por cada uno de los elementos de
la 1º fila y se sumara su resultado con el número que
le corresponda en columna de la segunda fila. En el caso de la
3ª fila se multiplicara a -5 (opuesto de 5) por cada uno de
los elementos de la 1º fila y se sumara su resultado con el
número que le corresponda en columna de la tercera
fila.

Nuestro siguiente paso es obtener el 1 de la 2ª
fila de la matriz identidad, y procedemos de igual forma que
antes, es decir multiplicamos toda la fila por el inverso del
número que deseamos transformar en 1, en este caso
-13/2, cuyo inverso es -2/13
Además si observamos la tercera fila, nos damos
cuenta que todos los elementos poseen el mismo denominador,
entonces podemos eliminarlos multiplicando todos los elementos de
la 3º fila por 2 (el denominador); si bien este no es un
paso necesario para el desarrollo del método, es
útil para facilitar cálculos
posteriores.

Ahora queremos obtener el 0 que se ubica en la
3ª fila, 2ª columna de
la matriz identidad, para hacer esto buscamos el
opuesto del número que se ubica en la 3ª fila,
2ª columna de la matriz con la cual estamos operando, en
este caso -17, cuyo opuesto será 17; lo que hacemos
ahora es multiplicar este número por todos los
elementos de la 2ª fila y sumar esos resultados con el
número que le corresponde en columna de la 3ª
fila.

A esta altura podemos observar como la matriz con la
cual estamos operando empieza a parecerse a la matriz
identidad.
Nuestro siguiente paso es obtener el 1 correspondiente a
la 3ª fila, 3ª columna de la matriz identidad, ahora
bien, aplicamos el mismo procedimiento con el que
estábamos trabajando, es decir que vamos a multiplicar
toda la 3ª fila por el inverso del número que se
encuentre en la posición de la 3ª fila, 3ª
columna, en este caso 96/13, cuyo inverso será
13/96.

Luego debemos obtener los dos ceros de la tercera
columna de la matriz identidad, para lograr esto, buscamos el
opuesto de los números que se ubicaron por encima del
1 de la 3ª columna de la matriz con la cual estamos
operando, en este caso 11/13 y ½ cuyos opuestos
serán – 11/13 y -½, respectivamente.
Una vez hecho esto, se procederá a multiplicar
los opuestos de estos números por cada uno de los elemento
de la 3ª fila y estos se sumaran a los números de su
respectiva columna. Por ej.: en el caso de la 2º fila, se
multiplicara a – 11/13 (opuesto de 11/13) por cada uno de los
elementos de la 3º fila y se sumaran sus resultados con el
número que le corresponda en columna de la segunda fila.
En el caso de la 1ª fila se multiplicara a -½
(opuesto de ½) por cada uno de los elementos de la 3º
fila y se sumaran sus resultados con el número que le
corresponda en columna de la primera fila.

El último paso que debemos realizar es
obtener el 0 de la 1ª columna, 2ª fila de la matriz
identidad, para hacer esto buscamos el opuesto del
número que se ubica en la 1ª columna, 2ª
fila de la matriz con la que estamos operando, en este caso
es 3/2, cuyo opuesto será – 3/2, lo que hacemos ahora
es multiplicar este número por todos los elementos de
la 2ª fila y sumar esos resultados con el número
que le corresponde en columna de la 1ª fila.

(Ditutor, 2007)Como podemos observar hemos llegado
al modelo de la matriz identidad que buscábamos,
y en la cuarta columna hemos obtenido los valores de
las variables, correspondiéndose de este
modo:
x= 1
y= -1
z= 2
Luego,
el sistema de ecuaciones está
resuelto y por último lo verificamos.
2x + 3y + z = 1 3x – 2y – 4z = -3 5x –
y – z = 4
2*1+3*(-1)+2=1 3*1- 2*(-1)-4*2=-3 5*1-(-1)-2
=4
2 -3 +2 =1 3 +2 – 8= -3 5 +1 – 2 = 4
1 = 1 -3 = -3 4= 4
Sistema de Ecuaciones Lineales consistentes e
inconsistentes
Por lo general, hay tres posibilidades para un sistema
de ecuaciones lineales: ninguna solución, una sola
solución, o un número infinito de soluciones. Un
sistema que tiene una o más soluciones se llama
consistente. Si no hay soluciones, el sistema se llama
inconsistente. Un sistema con menos ecuaciones que
incógnitas se llama indeterminado. Aquellos son los
sistemas que frecuentemente tienen un número infinito de
soluciones. Un sistema en que el número de ecuaciones
excede el número de incógnitas se llama super
determinado. En un sistema super determinado, cualquier cosa
puede pasar, pero tal sistema es frecuentemente
inconsistente.
Pruebe la herramienta Gauss-Jordan y pivotador para sus
computaciones con matrices. Funciona en modo de fracción,
número entero, y decimal. Si prefiere una versión
Excel, pulse aquí.
Ejemplo:
El sistema
2x – y + 3z = 0
x + y – 3z = 1
es indeterminado y consistente con
solución
x = 1/3; y = 2/3 + 3z, z arbitraria.
El sistema
x + y – z = 4
3x + y – z = 6
x + y – 2z = 4
3x + 2y – z = 9
Es súper determinado y consistente con una
única solución
x = 1, y = 3, z = 0
Regla de Cramer
(Guerrero, 2013)Se dice que un sistema AX= B de m
ecuaciones con n incógnitas es de Cramer si:

Observar que la matriz cuyo determinante aparece en el
numerado se obtiene cambiando en la matriz A la columna i-enesima
por la columna de los términos independientes
Teorema Resumen
Sea A una matriz de orden nxn. Entonces las cuatro
afirmaciones siguientes son equivalentes. Es decir, cada una de
ellas implica las otras tres (de manera que si se cumple una,
todas se cumples, y si una es falsa, todas son falsas)
A es invertible
La única solución al sistema
homogéneo Ax=0 es la solución trivial
(x=0)A es equivalente por renglones a la matriz identidad
Inxn; es decir, la forma escalonada reducida por renglones de
A es InxnDet (A) diferente de 0
Sistema de ecuaciones no lineales en el
plano
Un sistema en el que alguna de las ecuaciones que lo
forman no es lineal ya adquiere la condición de no lineal.
Para resolverlo, suele emplearse el método de
sustitución; aunque el de igualación también
puede ser muy efectivo.
Sistema de inecuaciones lineales en el
plano
En el caso de que las inecuaciones que componen el
sistema tengan dos incógnitas, la solución es la
región del plano obtenida como intersección de las
regiones solución de cada una de las
inecuaciones.
Programación lineal
La Programación Lineal es un procedimiento o
algoritmo matemático mediante el cual se resuelve un
problema indeterminado, formulado a través de ecuaciones
lineales, optimizando la función objetivo, también
lineal.
Consiste en optimizar (minimizar o maximizar) una
función lineal, denominada función objetivo, de tal
forma que las variables de dicha función estén
sujetas a una serie de restricciones que expresamos mediante un
sistema de inecuaciones lineales.
¿Cómo resolver un problema mediante
programación lineal?
El primer paso para la resolución de un problema
de programación lineal consiste en la
identificación de los elementos básicos de un
modelo matemático, estos son:
Función Objetivo
Variables
Restricciones
El siguiente paso consiste en la determinación de
los mismos, para lo cual proponemos seguir la siguiente
metodología:
La función objetivo
La función objetivo tiene una estrecha
relación con la pregunta general que se desea responder.
Sí en un modelo resultasen distintas preguntas, la
función objetivo se relacionaría con la pregunta
del nivel superior, es decir, la pregunta fundamental. Así
por ejemplo, si en una situación se desean minimizar los
costos, es muy probable que la pregunta de mayor nivel sea la que
se relacione con aumentar la utilidad en lugar de un interrogante
que busque hallar la manera de disminuir los costos.
Las variables de decisión
Similar a la relación que existe entre objetivos
específicos y objetivo general se comportan las
variables de decisión respecto a la función
objetivo, puesto que estas se identifican partiendo de una serie
de preguntas derivadas de la pregunta fundamental. Las variables
de decisión son en teoría factores controlables del
sistema que se está modelando, y como tal, estas
pueden tomar diversos valores posibles, de los cuales se precisa
conocer su valor óptimo, que contribuya con la
consecución del objetivo de la función general del
problema.
Las restricciones
Cuando hablamos de las restricciones en un problema
de programación lineal, nos referimos a todo aquello que
limita la libertad de los valores que pueden tomar las variables
de decisión. La mejor manera de hallarlas consiste en
pensar en un caso hipotético en el que decidiéramos
darle un valor infinito a nuestras variables de decisión,
por ejemplo, ¿qué pasaría sí en un
problema que precisa maximizar sus utilidades en un sistema de
producción de calzado decidiéramos producir una
cantidad infinita de zapatos? Seguramente ahora nos
surgirían múltiples interrogantes, como por
ejemplo:
¿Con cuánta materia prima cuento para
producirlos?¿Con cuánta mano de obra cuento para
fabricarlos?¿Pueden las instalaciones de mi empresa
albergar tal cantidad de producto?¿Puedo financiar tal empresa?
Pues bueno, entonces habríamos descubierto que
nuestro sistema presenta una serie de limitantes, tanto
físicas, como de contexto, de tal manera que los valores
que en un momento dado podrían tomar nuestras variables de
decisión se encuentran condicionados por una serie de
restricciones.
Sistema de inecuaciones no
lineales
Un sistema de ecuaciones es no lineal, cuando al menos
una de sus ecuaciones no es de primer grado. Además, estas
inecuaciones contienen expresiones con radicales, que incluyen
valor absoluto, polinómicas racionales, exponenciales,
logarítmicas, trigonométricas, etc. Se destaca
también, que en estos problemas las fronteras pueden ser
curvas o rectas.
Bibliografía
Baldor, A. d. (2003). Vitutor.
Obtenido de
http://www.vitutor.com/algebra/determinantes/propiedades.html
Carrasco, A. (2012). Obtenido de
http://www.monografias.com/trabajos72/resolucion-sistemas-metodo-gauss-jordan/resolucion-sistemas-metodo-gauss-jordan2#ixzz3JXCRvn3l
Ditutor. (14 de septiembre de 2003).
Obtenido de Matematicas Virtuales:
http://www.ditutor.com/matrices/suma_matrices.html
Ditutor. (2007). Obtenido de
Gauss:
http://www.ditutor.com/ecuaciones_grado2/metodo_gauss.html
Ditutor. (agosto de 2007).
Obtenido de
http://www.ditutor.com/matrices/multiplicacion_escalar.html
Guamanzara. (1994). Obtenido de
http://www.ditutor.com/matrices/suma_matrices.html
Guerrero. (2013). Obtenido de
http://www.monografias.com/trabajos72/resolucion-sistemas-metodo-cramer/resolucion-sistemas-metodo-gauss-jordan#ixzz3JXCIds1h
Matematicas Particulares. (s.f.).
Obtenido de
http://www.aulafacil.com/matematicas-matrices-determinantes/curso/Lecc-12.htm
Morales, J. (s.f.). Mundo Crecer.
Obtenido de •
/trabajos24/ecuaciones-lineales/ecuaciones-lineales#ecuaclineal#ixzz3JWq4WJGp
Thales de Milato. (2008). Obtenido
de
http://thales.cica.es/rd/Recursos/rd99/ed99-0289-02/mat031.html
Universidad de Americas. (enero de
2006). Obtenido de
http://docencia.udea.edu.co/GeometriaVectorial/uni2/seccion21.htm
Unizar. (enero de 1999). Obtenido
de
http://www.unizar.es/aragon_tres/unidad6/Sistemas/u6sispr60a.pdf
Wikibooks. (s.f.). Obtenido de
http://es.wikibooks.org/wiki/Matem%C3%A1ticas/Matrices/Multiplicar_una_matriz_por_un_escalar
Autor:
Zara Chimbo
Elizabeth Montalvo
Dora Arroyo
MATERIA:
Álgebra
CATEDRÁTICO:
Arq. Levi Bravo
FECHA DE ENTREGA
27 de Noviembre de 2014