
1 Buses Un bus es un camino de comunicación compartido
entre dos o más dispositivos Cualquier señal
transmitida estará disponible para todos los demás
dispositivos Sólo un dispositivo puede transmitir en un
momento dado Si dos dispositivos transmiten al mismo tiempo, sus
señales se solaparán y, probablemente, se
distorsionarán Los dispositivos deben obtener el control
del bus antes de poder utilizarlo para transferir
información
2 Líneas de comunicación Un bus suele estar formado
por varias líneas de comunicación Cada línea
tiene un significado o función particular
Físicamente, las líneas de comunicación no
son sino un conjunto de conductores eléctricos Cada
línea transmite señales digitales binarias (0,1) Se
puede transmitir una secuencia de dígitos binarios a
través de una única línea durante un
intervalo de tiempo Se pueden utilizar varias líneas del
bus para transmitir dígitos binarios
simultáneamente en paralelo

3 Estructura del tema Introducción Buses: conceptos
generales Estructura de un bus Jerarquías de buses
múltiples Elementos de diseño de un bus El bus PCI
Estructura Órdenes Transferencia de datos Arbitraje
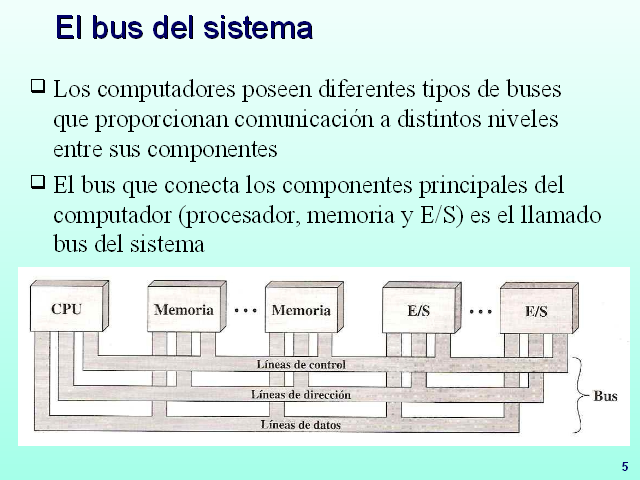
4 El bus del sistema Los computadores poseen diferentes tipos de
buses que proporcionan comunicación a distintos niveles
entre sus componentes El bus que conecta los componentes
principales del computador (procesador, memoria y E/S) es el
llamado bus del sistema

5 Estructura del tema Introducción Buses: conceptos
generales Estructura de un bus Jerarquías de buses
múltiples Elementos de diseño de un bus El bus PCI
Estructura Órdenes Transferencia de datos Arbitraje

6 Estructura del bus del sistema Aunque existen diseños
muy diversos, las líneas que forman el bus del sistema
pueden clasificarse en tres grupos funcionales: datos,
dirección y control También pueden existir
líneas de alimentación para suministrar
energía a los módulos conectados al bus

7 Líneas de datos Las líneas de datos proporcionan
un camino para transmitir datos entre los módulos del
sistema El conjunto de las líneas de datos suele
denominarse bus de datos Se suele hablar de “anchura del
bus” para referirse al número de líneas de
datos La anchura del bus de datos es un factor clave para
determinar el rendimiento de un sistema Cada línea puede
transportar un único bit cada vez La anchura del bus
determina cuantos bits se puden transmitir de forma
simultánea y, por tanto, la velocidad de
transferencia

8 Líneas de dirección Las líneas de
dirección se utilizan para designar la fuente o el destino
del dato situado en el bus de datos Posición de memoria
Dispositivo de E/S La anchura del bus de direcciones determina el
tamaño máximo del espacio de direcciones del
sistema Cuando la E/S está asignada en memoria, el espacio
de direcciones se comparte entre memoria y E/S Cuando la E/S
está aislada de memoria, los espacios de direcciones
están separados y tienen el mismo tamaño
máximo

9 Líneas de control Dado que las líneas de datos y
direcciones son compartidas por todos los dispositivos conectados
al bus, debe existir alguna forma de controlar su uso El
propósito de las líneas de control es: Determinar
quien accede a las líneas de datos y direcciones Gestionar
el uso que se hace de esas líneas Transmitir
órdenes que especifican las operaciones a realizar
Transmitir información de temporización que indica
la validez de los datos y direcciones

10 Algunas líneas de control típicas Escritura en
memoria: hace que el dato presente en el bus se escriba en la
posición direccionada Lectura de memoria: hace que el dato
de la posición direccionada se sitúe en el bus
Escritura de E/S: hace que el dato presente en el bus se
transfiera a través del puerto de E/S direccionado Lectura
de E/S: hace que el dato presente en el puerto de E/S
direccionado se sitúe en el bus Transferencia reconocida:
indica a un dispositivo que el dato que envió ha sido
aceptado o que el dato que desea está disponible en el
bus

11 Algunas líneas de control típicas
Petición de bus: indica que un dispositivo necesita
disponer del control del bus Cesión de bus: indica que se
cede el control del bus a un dispositivo que lo había
solicitado Petición de interrupción: indica que hay
una interrupción pendiente Interrupción reconocida:
señala que la interrupción pendiente ha sido
aceptada Reloj: se utiliza para sincronizar operaciones Reinicio:
devuelve los dispositivos conectados a su estado inicial

12 Estructura física El bus del sistema se extiende a
traves de todos los componentes del sistema, cada uno de los
cuales se conecta a algunas o a todas las líneas del bus
Una organización clásica consiste en una
distribución longitudinal a lo largo de la que se
distribuyen ranuras de conexión (slots) a intervalos
regulares

13 Estructura física El sistema completo se introduce
dentro de un chasis que también contiene la fuente de
alimentación, algunos dispositivos periféricos,
etc… Cada uno de los componentes principales del sistema
ocupa una o varias tarjetas que se conectan al bus a
través de las ranuras de conexión

14 Estructura física Esta disposición es muy
práctica porque permite expandir el sistema
añadiendo nuevas tarjetas o actualizarlo/repararlo
sustituyendo tarjetas No obstante, los sistemas actuales tienden
a tener sus componentes principales en una misma tarjeta El
procesador, la memoria caché y el bus que los comunica se
integran en un único componente La memoria y otros
dispositivos siguen estando en tarjetas separadas que se
comunican con el procesador por medio del bus del sistema

15 Estructura del tema Introducción Buses: conceptos
generales Estructura de un bus Jerarquías de buses
múltiples Elementos de diseño de un bus El bus PCI
Estructura Órdenes Transferencia de datos Arbitraje

16 Inconvenientes de tener un bus único El rendimiento de
un bus puede disminuir si se conecta un gran número de
dispositivos A más dispositivos conectados, mayor retardo
de propagación Los dispositivos tardarán más
en coordinarse para usar el bus Si el control del bus pasa con
frecuencia de un dispositivo a otro, los retardos
afectarán al rendimiento Entre más peticiones
reciba el bus, más probable será que se cruce la
barrera de su capacidad máxima, convirtiéndose el
bus en un cuello de botella Puede resolverse usando buses
más rápidos y/o más anchos La velocidad y la
anchura tienen límites físicos, mientras que la
velocidad de transferencia que necesitan los dispositivos
conectados al bus se está incrementando
rápidamente

17 Jerarquía de buses El bus único está
destinado a dejar de utilizarse La mayoría de los
computadores utilizan varios buses organizados de forma
jerárquica

18 Jerarquía de buses El procesador se conecta con la
memoria caché por medio de un bus local al que
también pueden conectarse dispositivos de E/S
locales

19 Jerarquía de buses El controlador de la memoria
caché se conecta tanto al bus local como al bus del
sistema, donde se encuentran los distintos módulos de la
memoria principal

20 Jerarquía de buses Los controladores de E/S se pueden
conectar directamente al bus del sistema Las transferencias entre
la memoria y la E/S no interferirán en la actividad del
procesador

21 Jerarquía de buses Es más eficiente conectar los
controladores de E/S a un bus de expansión Su interfaz
regula las transferencias de datos entre los controladores E/S
conectados a él y el bus del sistema

22 Jerarquía de buses El bus de expansión permite:
Conectar una amplia variedad de dispositivos de E/S Aislar el
tráfico de información Memoria ?? Procesador del
tráfico correspondiente a la E/S

23 Jerarquía de buses de alto rendimiento La
jerarquía de buses tradicional es razonablemente
eficiente, pero no consigue adaptarse al continuo aumento del
rendimiento de los dispositivos de E/S La respuesta a este
problema consiste en utilizar un bus de alta velocidad
Estrechamente integrado al resto del sistema Sólo se
requiere un adaptador (bridge) entre el bus del procesador y el
bus de alta velocidad Esta arquitectura recibe el nombre de
“arquitectura de entreplanta”

24 Jerarquía de buses de alto rendimiento El procesador se
conecta por medio de un bus local al controlador de la memoria
caché El controlador de la memoria caché se conecta
a su vez al bus del sistema donde está la memoria
principal

25 Jerarquía de buses de alto rendimiento El controlador
de la memoria caché está integrado junto con el
adaptador o dispositivo de acoplo que permite la conexión
con el bus de alta velocidad

26 Jerarquía de buses de alto rendimiento El bus de alta
velocidad se utiliza para conectar los controladores de E/S
rápidos que así lo necesiten Los más lentos
pueden conectarse al bus de expansión, que usa una
interfaz para adaptar el tráfico que circula

27 Jerarquía de buses de alto rendimiento La ventaja de
esta organización es que el bus de alta velocidad acerca
al procesador los dispositivos que exigen un rendimiento elevado
pero, al mismo tiempo, es independiente del procesador

28 Jerarquía de buses de alto rendimiento Los adaptadores
e interfaces tratan con las diferencias de velocidad y de
definición de líneas de los buses Los cambios
realizados en una parte de la arquitectura no afectan a las
demás partes

29 Estructura del tema Introducción Buses: conceptos
generales Estructura de un bus Jerarquías de buses
múltiples Elementos de diseño de un bus El bus PCI
Estructura Órdenes Transferencia de datos Arbitraje

30 Elementos de diseño de un bus Existe una gran variedad
de diseños de buses pero, en general, hay unos pocos
elementos comunes de diseño que permiten clasificarlos y
distinguirlos unos de otros

31 Tipos de buses Las líneas de bus se pueden dividir en
dos tipos genéricos: Dedicadas: están
permanentemente asignadas a una función o a un conjunto de
componentes del computador Un ejemplo típico de
dedicación funcional es el uso de líneas separadas
para direcciones y datos Multiplexadas: pueden utilizarse para
propósitos diferentes Direcciones y datos podrían
transmitirse por la misma línea si se utilizara una
señal de control “Dirección
Válida” Se pone la dirección en el bus y se
activa la línea de control, dando un tiempo para que los
distintos controladores lean el bus y comprueben si están
siendo direccionados Después de un periodo de tiempo se
quita la dirección del bus y se utilizan las mimas
líneas para realizar la transferencia

32 Tipos de buses La dedicación física requiere el
uso de múltiples buses, cada uno de los cuales conecta
solo a un conjunto de controladores Ventaja: alto rendimiento por
el menor número de conflictos Desventaja: incremento del
costo y el tamaño del sistema El multiplexado en el tiempo
de las líneas permite utilizar las mismas líneas
para usos diferentes Ventaja: normalmente ahorra espacio y costes
Desventajas: Los controladores necesitarán una
circuitería más compleja La falta de paralelismo
puede reducir el rendimiento

33 Método de arbitraje En un momento dado puede haber
más de un controlador intentando usar el bus, pero
sólo uno de ellos puede obtener el control y usarlo para
transmitir Es necesario disponer de un método de arbitraje
que determine quién utiliza el bus En general, los
diversos métodos de arbitraje se pueden clasificar en:
Centralizados Distribuidos

34 Método de arbitraje El objetivo de ambos métodos
de arbitraje es designar un dispositivo como “maestro del
bus”, el cual iniciará una transferencia hacia otro
dispositivo (esclavo) En un esquema centralizado hay un
único dispositivo físico llamado controlador de bus
o árbitro El árbitro es el responsable de asignar
tiempos en el bus Puede ser un módulo separado o parte del
propio procesador En un esquema distribuido no existe un
árbitro central Cada módulo dispone de
lógica para controlar el acceso Los módulos
actúan conjuntamente para compartir el bus

35 Temporización El término temporización
hace referencia a la forma en la que se coordinan los eventos en
el bus Con temporización síncrona, la presencia de
un evento en el bus está determinada por una señal
de reloj El reloj es una línea del bus a través de
la que se transmite una secuencia de 1s y 0s a intervalos
regulares de igual duración El ciclo de reloj o de bus es
el intervalo mínimo en el que la señal toma los dos
valores posibles y define la unidad de medida del tiempo dentro
del bus (time slot) Todos los eventos empiezan al principio del
ciclo de bus Con temporización asíncrona, la
presencia de un evento en el bus es consecuencia y depende de que
se produzca un evento previo

36 Temporización La temporización síncrona
es más fácil de implementar y comprobar Sin
embargo, la temporización síncrona es menos
flexible debido a que todos los dispositivos conectados al bus
deben operar a la misma frecuencia de reloj y, por tanto, no
siempre se aprovecharán sus posibilidades La
temporización asíncrona permite que una mezcla de
dispositivos rápidos y lentos, construidos con distintas
tecnologías, compartan un mismo bus

37 Temporización síncrona

38 Temporización asíncrona: lectura

39 Temporización asíncrona: escritura

ESTA PRESENTACIÓN CONTIENE MAS DIAPOSITIVAS DISPONIBLES EN
LA VERSIÓN DE DESCARGA