
Objetivos Ver la integración del microcontrolador en la
Robótica Móvil Exponer ejemplos concretos de Robots
Móviles con los PIC16F87x Dar una visión general
sobre la construcción de Robots Móviles Describir
las principales características de la Robótica
Móvil

Los microcontroladores Pic16F87x ¿Qué es un
microcontrolador? Microcontrolador (µC): Dispositivo
integrado que incluye un microprocesador, memoria y dispositivos
periféricos (dispositivos de ENTRADA/SALIDA, convertidores
A/D, puerto de comunicación, etc.). Los PICS son
microcontroladores de la casa Microchip.
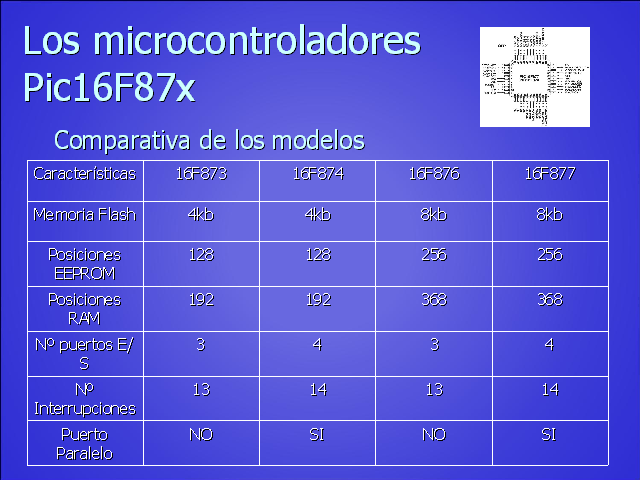
Los microcontroladores Pic16F87x Comparativa de los modelos

Los microcontroladores Pic16F87x Características
especiales Todos los PIC16F87X tienen una serie de elementos
integrados, pensados para minimizar el coste de un diseño
al eliminar componentes externos discretos. Los elementos son: 1.
Oscilador 2. RESET 3. Varios niveles de interrupción 4.
Temporizador Watchdog 5. Instrucción SLEEP 6.
Protección de código 7. Circuitería de
programación serie 8. Comunicación serie

Los microcontroladores Pic16F87x Características
especiales RESET Podemos distinguir entre varios tipos de RESET:
Por conexión de alimentación Activación del
pin de Reset Reset provocado por el Watchdog Reset
provocado por una caída del voltaje Temporizador Watchdog
(WDT) No requiere componentes externos No se deshabilita en modo
SLEEP Habilitación mediante la palabra de
configuración Las instrucciones CLRWDT y SLEEP ponen a
cero el WDT

Los microcontroladores Pic16F87x Características
especiales SLEEP Modo bajo consumo ejecutando la
instrucción SLEEP. Se sale del modo bajo consumo mediante:
Reset externo (#MCLR) Desbordamiento del WDT Interrupciones si
están habilitadas La primera condición causa un
Reset del dispositivo. Las demás lo despiertan y continua
la ejecución donde se había parado

Los microcontroladores Pic16F87x Influencia de las
características especiales de los PICS en los Robots
Móviles SLEEP Modo bajo consumo SLEEP, nos permite reducir
el consumo energético del robot con lo que podemos ampliar
su alcance. WATCH DOG Este timer lo aplicaremos como medida de
seguridad en el caso de colapso. PWM El pulso de amplitud
modelada nos permite controlar los motores paso a paso del Robot
Móvil.

Aplicación del Pic16F87x en la Robótica
Móvil Listado de Robots con el PIC XPLORER-DETECTOR DE
MINAS ANTIPERSONALES SCRATCH ROBOT EXPLORADOR ARAÑA
PLATAFORMA SUBACUÁTICA ROBOT PIONERO 1B PUÑALADA
AMARILLA GOS7 MICRO ROBOT "VOYAGER" ROBOT SUMO”
MAMPO”

Aplicación del Pic16F87x en la Robótica
Móvil XPLORER-DETECTOR DE MINAS ANTIPERSONALES El robot es
dirigido mediante radio frecuencia. Control mediante PC, procesa
las imágenes enviadas por el robot y monitoriza el estado
del sensor de minas. El operario dirige remotamente al robot. Al
detectar una mina se deshabilita el control remoto y coloca un
detonador. El robot se puede desplazar sobre 3 ejes: X,Y y uno de
rotación sobre si mismo.

Aplicación del Pic16F87x en la Robótica
Móvil Características técnicas Robot:
Microcontrolador: PIC 16F873 Sistema motor: Dos servomotores.
Lanzador detonador: Motor (vibrador de móvil). Sensores:
Cámara C-MOS B/N. Sensor de temperatura: LM335. Detector
de metales. Voltaje batería motores. Voltaje
batería lógica. Control remoto: Módulo FM
Aurel. Módulo Vídeo Aurel. El robot está
gobernado por un microcontrolador (PIC16F873), el cual se encarga
de gobernar motores, sensores, módulo de RF…

Aplicación del Pic16F87x en la Robótica
Móvil PLATAFORMA ROBÓTICA SUBACUÁTICA
Estructura: Existe una tendencia creciente por emular las
características de los animales para mejorar la eficiencia
de los sistemas de robots actuales. El área de
vehículos subacuáticos hace incursión en
esta tendencia imitando formas de animales acuáticos y
recientemente, imitando su forma de propulsión. La
plataforma robótica tiene una apariencia similar a la de
una raya, un cuerpo rígido y una aleta flexible que le
permite propulsarse para avanzar y girar.

Aplicación del Pic16F87x en la Robótica
Móvil Características técnicas Robot: •
Sistema estructural Hace referencia a la recámara
impermeable, forma hidrodinámica y el lastre que
posibilita su inmersión. • Sistema mecánico
Genera el movimiento de la aleta flexible. Dos motores DC y un
arreglo de piñones que reducen su velocidad y aumentan su
fuerza, el motor de propulsión gira, causando el aleteo de
la cola, y el de giro toma una posición que define la
orientación de aleteo. • Sistema electrónico
Microcontrolador PIC16F873, dos acelerómetros ADXL202, dos
drivers TEA3717 para los motores, y un arreglo de pares
emisor-receptor de infrarrojo. El arreglo de infrarrojos permite
conocer la orientación de la cola y el número de
aleteos realizados.

Aplicación del Pic16F87x en la Robótica
Móvil GOS7 La forma de GOSSET es una copia
biomimética de un pequeño perro y se inspira en el
comportamiento canino. Dispone de cuatro patas articuladas para
desplazarse y de una cabeza con boca articulada y una cola
móvil para fomentar la interacción emocional con
las personas. El robot GOS7 esta programado para que responda
delante ciertas perturbaciones. El diseño de la pierna
tiene dos grados de libertad: – la rodilla es de rotación
libre aunque tiene un tope en la parte delantera – la
rotación de la cadera se controla mediante un servo. El
PIC 16F876 controla el moviento del GOS7.

Aplicación del Pic16F87x en la Robótica
Móvil Características técnicas Robot PIC
16F876 Sensores de proximidad por infrarrojos Sensores de
movimiento por infrarrojo Sensores de contacto
(electromagnéticos) Sensores de fuerza Siete servos de
diferente tamaño y par Batería de 4,8V (1.300 mAh)
NiCd Robot: 1.100 gramos Baterías: 190 gramos

Aplicación del Pic16F87x en la Robótica
Móvil Otros modelos: SCRATCHI: formado por una placa de
circuito impreso sobre la cual va acoplado un PIC16F873 que
recibe información de los sensores y que está
programado para dar las ordenes necesarias de movimiento a los
servomotores en cada momento. ROBOT EXPLORADOR ARAÑA
envía las imágenes por radiofrecuencia a un
monitor. El control de las patas utiliza cuatro placas
controladoras. Cada una tiene un PIC 16F873-04/SP. Pic master y
tres slaves. El master controla a los slaves y cada uno de los
slaves dos de las patas. “MAMPO” para participar en
pruebas de sumo. La placa de control gobernada por dos PIC, un
16F876, y otro 16F872. El PIC16F876 se ha elegido por su
fácil programación y versatilidad, trabajando en
paralelo con el PIC16F872.

Aplicación del Pic16F87x en la Robótica
Móvil Otros modelos PIONERO 1B diseñado con
características de autonomía, programabilidad y
disparo de objetos. El microcontrolador PIC 16F877 trabaja como
sistema de control del robot. VOYAGER diseñado para seguir
una línea marcada en el suelo y recorrer ésta misma
con el menor tiempo posible. El robot es controlado por un
PIC16F874 PUÑALADA AMARILLA es una estructura realizada en
planchas de PVC a la que va atornillada la placa base en la que
se aloja el PIC 16F876 y los diversos conectores para la
colocación de los sensores. El PIC controla el movimiento
del robot.

Estructuras y componentes de un Robot Móvil
Evolución del proceso de diseño y
construcción. Para analizar la estructura de un Robot
Móvil podemos utilizar la siguiente clasificación:
Nivel físico Nivel de reacción Nivel de Control
Nivel de Inteligencia Nivel de Comunidad Nivel de
Cooperación

Estructuras y componentes de un Robot Móvil Nivel
físico: A la hora de elegir un motor para aplicaciones de
Robótica Móvil, debemos tener en cuenta que existen
varios factores como son la velocidad, el par, el frenado, la
inercia y el modo de control. Según la aplicación
podemos escoger entre: Motores de corriente continua Motores de
corriente continua con reductores Servomotores

Estructuras y componentes de un Robot Móvil Motores de
corriente continua: Los más económicos son los que
se utilizan en algunos juguetes, pero tienen el inconveniente de
que su número de revoluciones por segundo (RPS) es muy
elevado.

Estructuras y componentes de un Robot Móvil Motores de
corriente continua con reductores: Disminuyen la velocidad, le
dan más potencia al Robot para moverse, y proporcionan un
buen par de arranque.

Estructuras y componentes de un Robot Móvil Servomotores:
Como los que se usan en modelismo y radiocontrol. Se trata de
unos motores con un circuito electrónico. Cumplen unas
características que les hacen idóneos para la
construcción de Robots, tales como un buen par de salida,
potencia suficiente para trasladar objetos o una batería,
baja inercia, son capaces de mover 3,5 Kg/cm, incluyen multitud
de accesorios para poder fijar a una estructura plana (al ir
dentro de una carcasa de plástico rectangular con soportes
para fijar los tornillos).

Estructuras y componentes de un Robot Móvil Estructura: E.
Fischertechnik E. Mecano E. Lego

Estructuras y componentes de un Robot Móvil
Tracción del Robot utilizando ruedas: Dirección
Diferencial Estructura de triciclo Estructura de coche Estructura
independiente

Estructuras y componentes de un Robot Móvil Movilidad de
la estructura: Movimiento hacia atrás Movimiento hacia
delante Movimiento de giro a la izquierda Movimiento de giro a la
derecha

Estructuras y componentes de un Robot Móvil
Relación de materiales para la construcción de la
estructura de un Robot Móvil:

Conclusiones Hemos podido observar parte del amplio campo de la
Robótica Móvil Importancia del microcontrolador en
la Robótica Móvil Ampliación de
conocimientos de otras materias Seria interesante introducir esta
materia en el temario de la especialidad