
Tabla de conversión:
1 gcm2 = 0.000'000'1 kgm2 = 10-7 kgm2
1 kgm2 = 10'000'000 gcm2
= 107 gcm2
Velocidad de la carga NL
La unidad de velocidad de la carga solicitada se expresa en r.p.m.
La velocidad (N) proporciona el número de vueltas por minuto del eje del motor o del eje de sali-
da de la reductora, respectivamente. Como referencia genérica podemos indicar que el rango de
velocidad en motores de escobillas está por debajo de las 10.000 rpm y los motores sin esco-
billas, alcanzan velocidades superiores. En todo caso, no sobrepasaremos la máxima velocidad
permisible indicada por el fabricante, ni la máxima velocidad de entrada de la reductora, si no
queremos reducir la vida útil del accionamiento.
La velocidad está relacionada con la velocidad angular ( ? ) en rad/s por:
n = p /30* ?
Tabla de conversión:
1 rpm
1 rad/s
1 Hz
=
=
=
p / 30 rad/s =
9,549 rpm =
2 rad/s =
0,017 Hz
0,159 Hz
60 rpm
Con los valores del par (M) y la velocidad (n) se puede calcular la potencia mecánica (Pmec)
Pmec= p /30 * n * M
Relación de reducción i
La relación de reducción (i) describe la relación de velocidades entre el eje del motor (nB) y el
eje de la carga (nL):
nb / nL = i
13
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Inercia de la carga JL
La inercia de la carga con respecto del eje en rotación está expresada en Kgm2.
La inercia de una masa (J) viene dada por la distribución de su masa alrededor del eje en rota-
ción. La inercia es una medida que nos indica la dificultad al cambiar la velocidad de rotación.
Cada pequeña porción de masa (m) a una distancia del eje de rotación (x), añade m*r2 a la iner-
cia. En consecuencia, las masas con radios mayores contribuyen de manera importante (el cua-
drado de la distancia) a aumentar la inercia total de la carga J.
La inercia de la masa de los micromotores viene dada en gcm2 como unidad práctica.

Reductoras de engranaje recto
Reductoras de engranajes planetarios
1 etapa………eficiencia 90 %
6 etapas…….eficiencia 50 %
1 etapa………eficiencia 85 %
5 etapas…….eficiencia 40 %
Fuerza de transporte o fuerza de alimentación FL
La fuerza de transporte (FL) en N (Newtons) es la fuerza necesaria para mantener la carga
moviéndose a velocidad constante. Sólo se ha de vencer la fricción en movimientos horizonta-
les. En movimientos verticales (ej. grúas), la fuerza de transporte está compuesta de fricción
(FR) y peso (FG-fuerza gravedad ):
FL = FR + FG = FR + ( ML * a ) = FR + ( ML * 9,81 m/s2 )
En los movimientos en planos inclinados, la componente FG-fuerza gravedad , se suma a la
fuerza de transporte de acuerdo con el ángulo de inclinación:
FL = FR + ML * sen a * a (9,81 m/s2)
Con los valores de la fuerza de transporte (FL) y velocidad (v), podemos conocer la potencia
mecánica (Pmec) útil necesitada en movimientos lineales:
Pmec = vL * FL
14
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Eficiencia del accionamiento
No debemos olvidar a la hora de realizar cualquier cálculo, que todos los accionamientos tie-
nen pérdidas por fricción, en función del régimen de carga de la aplicación, tolerancias entre
piezas, tipos de materiales utilizados, grasas, estado de limpieza del sistema, etc…
En definitiva, cualquier pérdida de rendimiento ha de ser considerada para sobredimensionar el
conjunto motriz de la aplicación. Ante la falta de información, tome como patrón orientativo los
siguientes valores de las aplicaciones:
Engranajes……………………piñón – piñón de alta calidad….eficiencia …90%
Cinta transportadora de baja fricción…………………………….eficiencia …90%
Husillo con tuerca deslizante……………………………………….eficiencia 20-50 %
Husillo con tuerca de bolas recirculantes………………………eficiencia 95%
No olvide considerar la eficiencia de la reductora en caso de que el conjunto motriz incorpore
este elemento. Las reductoras tienen un abanico muy amplio de eficiencias según el nº de
etapas internas.

Diámetro de la polea en el
eje motor d1
El diámetro de la polea y la fuerza de trans-
porte / rotación, definen el par del motor en
funcionamiento continuo.
Diámetro de la polea d2
El diámetro de la polea es importante para un
funcionamiento dinámico, donde las poleas
son aceleradas / frenadas de diferente mane-
ra en función de su diámetro. El par adicional
necesario en los procesos de aceleración se
calcula usando la inercia de las poleas.
Inercia de la polea en el eje
motor J1
En aplicaciones de gran dinamismo, acelera-
ciones y frenadas bruscas, tenemos que con-
siderar esta inercia si el valor excede alrede-
dor de un 10% de la inercia de la carga.
J1 > 0.1 * JL
de
una
polea
Momento de inercia
J1 = ½ * m * r (radio)2
motor d1 y en el eje de la
carga d2
Estos diámetros definen la reducción (i):
i = d2 / d1.
Con la ayuda de la relación de reducción y
del par de la carga, podemos conocer el par
del motor para un funcionamiento en continuo.
MB = (d1 / d2 ) * ( ML /eficiencia transmisión )
15
Tabla de conversión:
1 gcm2 = 0.000'000'1 kgm2 = 10-7 kgm2
1 kgm2 = 10'000'000 gcm2 = 107 gcm2
Inercia total de la masa de las
poleas J2
En aplicaciones de gran dinamismo donde se
producen aceleraciones y frenadas bruscas,
tenemos que considerar esta inercia si el valor
excede alrededor de un 10% de la inercia de
la carga.
J2 > 0.1 * JL
Momento de inercia de una polea
J = ½ * M * r (radio) 2
Momento de inercia de la polea J2 referida al
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
eje motriz, donde está la polea J1.En estos
casos a la fórmula se le añade la relación i2,
donde i = d2/d1 es la relación de diámetros
entre poleas
J2 = ( ½ * M2 * r2 (radio)2 ) * i2
Diámetro de la polea en el eje

Paso del husillo p
El paso del husillo (p) define
junto con la fuerza de la
carga, el par del motor nece-
sario.
Antes de seleccionar un tipo
de husillo y su tuerca , verifi-
que su eficiencia, tuerca des-
lizante 25 – 40 % y husillo
con tuerca de bolas recircu-
lantes, ? 95%.
MB = (p / 2 * p ) * ( FL / efi-
ciencia transmisión )
Cuanto mayor sea el paso,
mayor par de motor se nece-
sitará para mover el acciona-
miento. A su vez, la veloci-
dad de salida del motor será
menor.
Nb = ( 60 / p ) x VL
Inercia del husillo
de bolas JS
La consideración de estas
inercias es importante para un
funcionamiento dinámico, si
los valores exceden alrededor
de un 10% de la inercia de la
carga (ML).
> 0.1 * JL
Para el cálculo del momento
de inercia del husillo JS refe-
rido al eje motriz, a la fórmu-
la se le añade la relación p2,
donde p es el paso del husi-
llo, valor en mm, y la masa
ML en kg.
JS = 0.025 * ML * p2
Tabla de conversión:
1 gcm2 = 0.000'000'1 kgm2 =
10-7 kgm2
1 kgm2 = 10'000'000 gcm2=
107 gcm2
16
www.BRUSHLESSMOTOR.ES
Tutorial motor DC

Motor (observacio-
nes generales)
Sistemas de conmutación
Rodamientos
Bobinado
Rangos de funcionamiento
Temperatura del bobinado
Tutorial motor DC
Conjunto escobilla-colector o conmutador, necesario para que el motor DC gire. El
colector de 13 delgas facilta la regulación y prolonga la vida en servicio del motor
de corriene continua.
Micromotor Brushless DC de 22 mm de diámetro. La ausencia de escobillas en la con-
mutación prolonga la vida útil del motor. Sin embargo necesita una electrónica de con-
trol de la conmutación
17
Reductora planetaria de 2 etapas, para
motor pequeño. Acoplada mediante un
piñón al eje del motor, reduce la velo-
cidad de giro y aumenta el par en pro-
porción a su relación de reducción.
www.BRUSHLESSMOTOR.ES

Sistemas de
conmutación
Normalmente el sistema de
conmutación limita la vida de
los motores CC. Por lo tanto
el funcionamiento correcto
de la conmutación se com-
prueba y se ajusta al final del
proceso de fabricación de
cada motor.
Escobillas y colector
de metal precioso
Este tipo de sistema de con-
mutación garantiza una resis-
tencia de contacto muy baja
y constante incluso después
de largos periodos de inacti-
vidad del motor. Las caracte-
rísticas principales de este
sistema son un bajo voltaje
de arranque, reducidas inter-
ferencias eléctricas y alta efi-
ciencia. Resulta ideal para
aplicaciones alimentadas por
baterías.
Amortiguación de la
chispa
La chispa es la causa princi-
pal del desgaste de las esco-
billas y del colector. El siste-
ma de filtro suprime de
manera muy eficiente gran
parte de la chispa. La vida
útil del motor se alarga en
gran medida.
18
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Colector de cobre para escobilla de grafito. Diseñado para conmutar corrientes eleva-
das, permite aplicaciones muy dinámicas con mucho ciclo de arranque-parada.
Escobillas de grafito
Se usan junto con colectores
de cobre para las aplicacio-
nes más rigurosas, como
puede ser el funcionamiento
de arranque / parada. Con
este sistema se puede llegar
a obtener decenas de millo-
nes de ciclos repetidamente.
Escobilla de 50% grafito, y 50% cobre.
Se aprecia el inicio del desgaste por su
interacción con el colector

Rodamientos
Cojinetes sinterizados
Se recomiendan en aplicaciones donde no
haya unas cargas mecánicas excesivas.
Suelen ser económicos y tienen lubricación
permanente. Una característica importante es
que el ruido mecánico producido por el motor
es muy bajo.
Rodamientos a bolas
Son recomendables con cargas extremas o para
conseguir la máxima vida útil.
Los lubricantes normales de cojinetes permiten
una temperatura de trabajo mínima de -20°C.
Bobinado de los motores
Para un mismo modelo de motor, hay distin-
tos bobinados disponibles. Esto hace que haya
motores de una misma potencia con distintos
voltajes nominales.
Esto se consigue seleccionando hilo de cobre
de diferente sección para un número especí-
fico de espiras.
19
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Como resultado, se obtienen diferentes resis-
tencias en los terminales del motor. Los datos
específicos de cada motor, velocidad y corrien-
te se ven influenciados por esas variaciones.
Sin embargo, el gradiente velocidad/par en los
motores DC es casi independiente del bobi-
nado y es prácticamente constante para cada
tipo de motor. El usuario a su vez, puede ele-
gir el motor óptimo para su aplicación en par-
ticular.
Alta resistencia entre bornes = hilo fino = baja
corriente de arranque (bobinado de alta resistencia).
Muchas espiras = baja velocidad específica
(rpm/Volt)
Baja resistencia entre bornes = hilo grueso =
alta corriente de arranque (bobinado de baja
resistencia) menos espiras, alta velocidad
específica (rpm/Volt).
En micromotores el mínimo diámetro del hilo
de cobre puede ser, por ejemplo de 0,032 mm.

Temperatura
Temperatura máx. del bobinado
Este es un factor que limita el rango de funcionamiento de
cada motor. El calor se genera en el bobinado y necesita
ser disipado hacia la superficie del motor. Nunca se debe
sobrepasar la máxima temperatura del rotor, ni siquiera duran-
te un corto espacio de tiempo.
La capacidad de trabajo del motor está directamente relacio-
nada con la diferencia entre la temperatura ambiente y la
máxima temperatura del rotor; también con el ciclo de tra-
bajo. La resistencia del bobinado aumenta y la fuerza del
campo magnético decrece cuando se eleva la temperatura,
resultando una reducción de la potencia de salida.
Estos factores han de tenerse en cuenta cuando se opera
en continuo con cargas altas.
Una buena circulación de aire o la utilización de bridas metá-
licas por las que el motor pueda disipar calor, son medidas
que pueden hacer que un motor entregue pares mayores a
los nominales.
20
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Curva de temperatura del bobinado en
color naranja. La curva en rojo es la
de corriente.
La corriente y la temperatura están
relacionadas.

Rangos de funcionamiento
Rango de funcionamiento en continuo
Los criterios máx. velocidad permitida y el máx. par en con-
tinuo, determinan el rango de funcionamiento en el cual, el
motor puede funcionar permanentemente. Cuando el motor
funciona dentro de este rango no habrá problemas de con-
mutación debido a altas velocidades ni sobrecalentamiento
del motor debido a elevadas corrientes. No obstante, si la
temperatura ambiente está por encima de los 25°C, el par
que el motor podrá entregar de manera continua se verá
reducido.
Rango de funcionamiento intermitente
El motor no debe funcionar en continuo más allá de su máxi-
ma corriente para evitar dañar el bobinado. Sin embargo, se
pueden permitir cortos periodos en los que la corriente (par)
sea más elevada. Siempre que el bobinado esté por deba-
jo de su máxima temperatura, no sufrirá daños.
Los periodos con corrientes altas deben ser cortos. Una medi-
da de cuánto puede durar la sobrecarga viene dada por la
constante térmica de tiempo del rotor.
La magnitud de los tiempos de sobrecarga varía desde varios
segundos para los motores pequeños hasta valores en el
orden de minutos para motores más grandes. El cálculo exac-
to del tiempo de sobrecarga depende de la corriente en el
motor y de la temperatura inicial del rotor.
21
Tutorial motor DC
El rango de funcionamiento en conti-
nuo (24 h.) está representado por la
parte de fondo blanco. El rango de fun-
cionamiento intermitente es el de la
parte coloreada.
1.- Máx. temperatura del bobinado
2.- Máxima corriente en continuo
www.BRUSHLESSMOTOR.ES
2
1

Datos del motor
Existen muchos parámetros que definen el
comportamiento del motor. Su estudio y com-
prensión facilitarán la comparación de las
prestaciones de dos motores distintos.
A continuación se puede ver un listado con
dichos parámetros:
Datos específicos del motor
constante de par
constante de velocidad
gradiente velocidad-par
Datos típicos del motor
potencia nominal asignada
velocidad en vacío
par de arranque
tensión nominal
corriente en vacío
corriente de arranque
Límites del motor
máx.
máx.
máx.
máx.
máx.
corriente en continuo
par permanente
potencia de a tensión nominal
rendimiento
velocidad permitida
22
Datos eléctricos y mecánicos adi-
cionales
constante de tiempo mecánica
inductancia en bornes
inercia del rotor
resistencia en bornes
constante de tiempo eléctrica
Datos térmicos
constantes de tiempo térmicas
resistencia térmica carcasa-ambiente
resistencia térmica rotor-carcasa
Otros datos
tolerancias
pérdidas en el hierro
pérdidas por Histéresis
pérdidas por las corrientes de Eddy
vida útil
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Motor brushless DC de tipo plano de 45 W.
Necesita una electrónica de conmutación pero propor-
ciona un vida útil prácticamnete ilimitada.

Potencia nominal asignada
símbolo: Pn
unidad W (Vatios)
Esta cifra representa la máxima potencia de
salida cuando se opera dentro del rango de
potencia de salida recomendado. A veces, la
comparación de motores basándose exclusi-
vamente en la potencia nominal puede resul-
tar engañosa.
Un ejemplo típico ocurre con los motores brus-
hless, los cuales suelen tener potencias ele-
vadas porque su velocidades nominales sue-
len ser muy altas. Si en una aplicación no se
requiere una velocidad elevada, puede que el
motor no sea capaz de entregar el par reque-
rido por la aplicación, aunque su potencia sea
la misma que otro motor más lento y de mayor
par. En la figura se puede ver la representa-
ción de la curva de potencia (en negro).
23
Tutorial motor DC
Tensión nominal
símbolo: U
unidad: V (Voltio)
Es el voltaje al cual se han medido los
datos nominales (velocidad en vacío, par de
arranque, corriente de arranque, máx. poten-
cia de salida, máx. rendimiento).
Se ha escogido este dato para no exceder
la máxima velocidad recomendada en vacío.
Por supuesto, el uso del motor no está limi-
tado a este voltaje. Para alcanzar la poten-
cia nominal asignada se permiten voltajes
de trabajo más elevados. La velocidad en
vacío, par de arranque y corriente de arran-
que dependen directamente del voltaje apli-
cado.
www.BRUSHLESSMOTOR.ES

1
2
Par de arranque
símbolo: MH
unidades: mNm (mili-Newton metro) Nm
(newton metro)
Es el par teórico a la tensión nominal y
con el rotor bloqueado. El par de arranque
aumenta proporcionalmente con el voltaje
aplicado.
El valor dado corresponde a una temperatu-
ra del rotor de 25°C. El incremento de la
temperatura del motor reduce considerable-
mente el par de arranque (hasta un 60%).
Por lo tanto, con un rotor caliente el funcio-
namiento intermitente con sobrecarga puede
estar limitado en gran medida.
El par de arranque está relacionado con la
corriente de arranque. Su conexión es la
constante de par kM
En la gráfica, el par de arranque está repre-
sentada en la línea velocidad-par (azul) en el
punto 2. Corresponde en la línea de corrien-
te, en rojo, a la corriente de arranque, punto
4 (rotor bloqueado). Debido a la elevada
corriente, el motor no debe permanecer mucho
tiempo en esta situación, para evitar daños al
motor.
24
3
Velocidad en vacío
símbolo: n0
unidad: rpm
Es la velocidad a la que gira el motor cuan-
do no tiene carga y se le aplica la tensión
nominal. En la práctica, esta velocidad es pro-
porcional al voltaje aplicado (constante de
velocidad).
Influencia de la temperatura
Un incremento de temperatura reduce el
campo magnético y por consiguiente, aumen-
ta la velocidad en vacío.
En la gráfica, la velocidad en vacío está repre-
sentada en la línea velocidad-par (azul) en el
punto 1.
Nótese que este punto corresponde en la línea
de corriente, en rojo, a la corriente en vacío,
punto 3.
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
4

Relación velocidad/par
símbolo: n/ M
unidad: rpm/mNm
La relación velocidad/par da información de
las prestaciones del motor y se representa por
la línea (o curva) velocidad-par. Cuanto más
pequeño es este valor, más potente es el
motor, y consecuentemente menor es la varia-
ción de la velocidad del motor con los cam-
bios en la carga.
Cálculo de la relación o gradiente velocidad / par.
La constante velocidad/par depende de las
prestaciones del circuito magnético (ej: imán
permanente), de las dimensiones del bobina-
do (longitud, diámetro, número de espiras) y
de la resistencia del bobinado.
En la práctica, la constante velocidad/par se
puede obtener dividiendo la velocidad en vacío
entre el par de arranque. Este gradiente está
representado en la gráfica de abajo como la
línea de color rojo.
25
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Corriente en vacío
símbolo: I0
unidad: mA (mili-Amperio), A (Amperio)
Esta es la corriente que consume el motor sin
carga, alimentado a su tensión nominal.
Depende de la fricción en las escobillas y los
rodamientos, y se incrementa al aumentar la
velocidad.
La fricción en vacío depende en gran medida
de la temperatura, particularmente para la con-
mutación con escobillas de metal precioso.
Aumenta a bajas temperaturas y disminuye en
funcionamiento continuo.
Motores brushless
En este tipo de motores la corriente en vacío
aumenta con el incremento de la velocidad,
debido a la fricción de los rodamientos y las
pérdidas en el hierro. En la gráfica, punto 1.
1

Corriente de arranque
símbolo: IA
unidad:mA, (milli-Amperio), A (Amperio)
Es el cociente entre el voltaje nominal U y la
resistencia en bornes R. Esta corriente es pro-
porcional al par de arranque. Ambas magnitu-
des están relacionadas mediante la constan-
te de par kM.
En determinadas ocasiones, el motor no puede
alcanzar esta corriente de arranque por los
límites de corriente de las fuentes de alimen-
tación o de las electrónicas de control.
Este punto corresponde en la línea de corrien-
te, en rojo, al punto 1 (rotor bloqueado). Debido
a la elevada corriente, el motor DC no debe
permanecer mucho tiempo en esta situación,
para evitar daños al motor.
26
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Resistencia entre bornes
símbolo R
unidad (Ohm)
Es la resistencia en los terminales a 25°C y
determina la corriente de arranque a un vol-
taje dado.
La resistencia entre bornes es un valor com-
puesto por la resistencia del bobinado, la resis-
tencia de la escobilla y la resistencia de con-
tacto entre la escobilla y el colector. Por lo
tanto, en el caso de escobillas de grafito debe
hacerse notar que la resistencia de contacto
varía con la densidad de la corriente.
En el caso del motor brushless: La resisten-
cia entre bornes fase a fase, es la resistencia
medida en los terminales del motor a 25°C.
En la conexión "estrella" esto resulta en el
doble de la resistencia de cada bobina, y en
la conexión "triángulo" en dos tercios de la
resistencia de cada bobina.
1

Máx. corriente en continuo (punto 1)
símbolo: Imax
unidad: mA (milli-Amperio), A (Amperio)
Si el motor funciona continuamente con esta
corriente y a 25°C de temperatura ambiente,
se calentará hasta alcanzar la máxima tem-
peratura del bobinado. Se asume que el motor
no tiene refrigeración adicional, sin otras pie-
zas que hagan de radiador de calor y aumen-
ten este valor sustancialmente. Un aumento
de la temperatura ambiente reduce la corrien-
te máxima en continuo.
Los bobinados con baja resistencia óhmica
admiten corrientes más altas que los bobina-
dos con alta resistencia. En motores con bobi-
nados de resistencia baja, la máxima corrien-
te en continuo puede estar limitada por las
escobillas y no por el bobinado. La máxima
corriente en continuo es equivalente al máx.
par permanente. Están relacionados por la
constante de par kM . En los motores brus-
hless la máx. corriente en continuo es el valor
eficaz de las corrientes de las tres fases, giran-
do a la velocidad de rotación indicada y a 25°C
de temperatura ambiente, resultando en una
temperatura máx. del bobinado de 125°C.
Cuando la velocidad aumenta por encima de
las 20.000 rpm, la máxima corriente en conti-
nuo disminuye debido al efecto del calor gene-
rado por las pérdidas en el hierro.
27
Máx. velocidad permitida
símbolo: nmax
unidad: rpm.
Esta velocidad representa el límite superior del
rango recomendado de funcionamiento y no
debería ser excedida durante el funcionamiento
normal del motor. La velocidad está limitada prin-
cipalmente por la conmutación. Si el motor gira
a velocidades superiores pueden aparecer pro-
blemas de conmutación, que a su vez pueden
llevar a reducir la vida útil del motor.
Esto es debido a los siguientes factores:
1.- Aumento del desgaste mecánico debido a
que la distancia recorrida por el colector es
mayor.
2.-Aumento del desgaste por electro-erosión
debido a la vibración de las escobillas y la for-
mación de chispas.
Además, la velocidad debe limitarse debido al
desequilibrado residual del rotor, el cual redu-
ce la vida útil de los rodamientos. La máxima
velocidad permitida en los motores brushless
se calcula en función de la vida útil de los
rodamientos (como mínimo 20.000 horas) con
el máximo desequilibrado del rotor y la máxi-
ma carga admisible.
Cuando se necesitan velocidades elevadas,
superiores a 20.000 rpm, es conveniente ele-
gir un motor sin escobillas ó un motor brus-
hless ó de conmutación electrónica.
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
1

Máximo par en continuo
símbolo: Mcont
unidad: mNm (mili-Newton metro), Nm
(Newton metro)
Es el par que se puede entregar continuamen-
te, o de media, alcanzando en el bobinado la
máxima temperatura admisible, basado en una
temperatura ambiente de 25°C.
A temperatura ambiente más alta, este valor
se reduce. El par máximo limita el rango reco-
mendado de funcionamiento.
Si el motor está montado en un soporte que
le ayude a disipar el calor, este valor puede
aumentar.
El máx. par en continuo es equivalente a la
máxima corriente en continuo. Están relacio-
nados por la constante de par kM
En la gráfica de abajo corresponde al punto
1, con un valor de 120 mNm.
28
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Máxima Potencia de salida a volta-
je nominal.
símbolo: Pmax
unidad: W (Vatios)
Es la máxima potencia teórica a 25°C de tem-
peratura del rotor. La máxima potencia se
alcanza en la mitad del par de arranque y la
mitad de la velocidad en vacío. Los límites
permitidos (máx. corriente en continuo y máx.
velocidad permitida) frecuentemente están por
debajo de este nivel.
En la gr.afica de abajo, corresponde al punto 1,
punto máximo de la curva de potencia, en
negro.
1
1

Eficiencia del motor
símbolo: ?
unidad:
%
Máxima eficiencia
Es la relación óptima entre potencia de entra-
da y potencia de salida, a tensión nominal.
La eficiencia se obtiene de la relación entre
la corriente en vacío y la corriente de arran-
que. Cuanto más alta sea la eficiencia, el punto
de trabajo estará más cerca de la velocidad
en vacío.
En la práctica, la máxima eficiencia está apro-
ximadamente a 1/7 del par de arranque.
Operar en este punto no significa necesaria-
mente que estamos en el punto de carga ópti-
ma.
Constante de par
símbolo: KM
unidad: mNm/A (mili-Newton metro por
Amperio)
Se puede definir también como "par especí-
fico" y representa la relación del par genera-
do y la corriente aplicada. La constante de
par transforma valores de par en valores de
corriente y viceversa.
Cálculo de la constante de par.
En la práctica, kM se determina por el par
de arranque MH y la corriente de arranque
IA.
En el cálculo teórico, han de tomarse en
consideración las dimensiones del bobinado
(longitud l, diámetro 2r, número de espiras
w), así como la fuerza del campo magnéti-
co.
La constante de par está relacionada con la
constante de velocidad kn ya que ambas
están determinadas por los mismos paráme-
tros.
La representación gráfica de la constante de
par es la curva de corriente (en rojo, gráfica
de arriba)
29
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Curva de eficiencia del motor, en
verde. En este punto, el motor apro-
vecha al máximo la potencia eléctrica
consumida transformándola en poten-
cia mecánica. La eficiencia máxima de
un motor eléctrico puede llegar a cifras
cercanas al 90% en el caso de moto-
res de precisión.

Constante de velocidad
símbolo: kn
unidad: rpm/V (revoluciones por minuto por
Voltio)
Muestra la velocidad específica por voltio del
voltaje aplicado sin contar las pérdidas por fric-
ción.
Cálculo de la constante de velocidad.
En la práctica, kn se determina por el voltaje
nominal U y la velocidad en vacío n0.
En el cálculo teórico, deben tenerse en cuen-
ta las dimensiones del bobinado (longitud l,
diámetro, número de espiras w), así como la
fuerza del campo magnético B0.
La constante de velocidad está relacionada
con la constante de par kM porque éstas se
determinan por los mismos parámetros.
Constante de generación (back EMF)
El recíproco de la constante de velocidad se
conoce como la constante de generación,
constante de voltaje o fuerza contra electro-
motriz. Expresa el voltaje en los terminales
con respecto a la velocidad, si el motor se usa
como tacodinamo CC o generador.
símbolo:
unidad:
tm
ms (milisegundos)
Es el tiempo que tarda el rotor en acelerar
desde parado hasta el 63% de la velocidad
en vacío. Este valor se calcula desestimando
las fricciones, carga e inercia de la carga.
Transcurridas 4 veces este valor ( t ) el rotor
habrá alcanzado más del 99% de la velocidad
en vacío.
Cálculo
La constante mecánica de tiempo se puede
calcular con la inercia del rotor y el gradien-
te velocidad-par
Bajo condiciones de carga
La inercia de la carga se debe añadir a la iner-
cia del rotor. Por lo tanto, la constante mecá-
nica de tiempo con carga será más larga.
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Inercia del rotor
símbolo: JR
unidad: gcm2 (gramos por centímetro cuadra-
do)
Es el momento de inercia del rotor, basado en
el eje de giro. Determina la constante de tiem-
po mecánica del motor.
Constante mecánica de tiempo
Curva de aceleración de un motor. La
constante mecánica de tiempo es el
tiempo que tarda el rotor en alcanzar
el 63 % de su velocidad final.
30

Inductancia entre bornes
símbolo L
unidad: mH (mili henrios)
Es la inductancia del bobinado estacionario y
medida con una onda senoidal de 1 kHz.
Los motores de rotor sin hierro poseen la
menor inductancia dentro de todos los moto-
res de corriente continua. Esto es debido a
que durante la conmutación es menor la ener-
gía magnética, y por tanto la chispa que se
produce al abrirse el contacto entre colector y
escobilla es menos pronunciada.
Los motores DC de rotor sin hierro tienen por
tanto:
– Una vida útil más larga.
– Menores emisiones electromagnéticas.
(Como regla general, no es necesario tomar
medidas para suprimir estas interferencias).
– Una inercia muy baja, con capacidad para
grandes aceleraciones y frenadas.
Constante eléctrica de tiempo del
motor
La inductancia entre bornes y la resistencia
entre bornes determina la constante eléctrica
de tiempo del motor. Este parámetro se refie-
re al tiempo requerido por la corriente para
aumentar o disminuir.
Típicamente, la constante eléctrica de tiempo
es de 100 a 1.000 veces más pequeña que
la constante mecánica de tiempo. Los cam-
bios de corriente ocurren instantáneamente
comparados con los cambios en velocidad.
Un fenómeno a destacar cuando la corriente
puede reaccionar de manera tan rápida, es el
caso de los motores que son alimentados
mediante PWM. En algunas ocasiones se
puede producir un rizo de corriente no dese-
ado que sobrecalienta al motor. En estos
casos, puede que sea necesario aumentar la
frecuencia del PWM o conectar una inductan-
cia adicional (p. ej. bobinas de choque)
31
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Rotor hueco o rotor sin hierro: baja
inductancia y baja inercia.
La baja inductancia da como resulta-
do la reducción de la chispa, prolon-
gando la vida del motor y disminuyen-
do las interferencias eléctricas.
La baja inercia se traduce en rápidas
aceleraciones y frenadas, y facilidad
de regulación.

Resistencias térmicas
símbolo:
unidad:
Rth1, Rth2
K/W (Kelvin por Vatio)
Resistencia térmica de la carcasa al
ambiente Rth2
Valor característico de la resistencia térmica
de contacto sin enfriamiento adicional (aletas
de refrigeración, enfriamiento activo por aire o
agua). En motores con brida metálica, la resis-
tencia térmica Rth2 puede disminuir hasta un
50% si el motor se acopla directamente a un
buen conductor de calor. (Un + 20% por ser
brida metálica + 30% por brida de acoplamien-
to externa). Por tanto, se recomienda por
ejemplo, utilizar bridas de anclaje metálicas
que permitirán obtener un mayor par en con-
tinuo del motor.
Resistencia térmica del rotor (bobi-
nado) a la carcasa Rth1
Valor característico de la resistencia térmica
entre el bobinado y la carcarsa.
Tiene un valor normalmente de 3 a 4 veces
inferior a la Rth2 (carcasa – ambiente), indi-
cándonos que la disipación térmica de calor
se hace con más rapidez. A menor resisten-
cia Rth1, el calor se transmite mejor ya sea
por convección o conducción, mejorando el
comportamiento térmico del bobinado en
casos de sobrecargas de corriente. Por lo
general, a medida que aumentamos de diá-
metro de motor, menor es la resistencia.
32
Las resistencias térmicas indican la capacidad
de evacuación o disipación de calor de un
motor a la atmósfera o entorno del mismo. La
capacidad de refrigeración depende de la dife-
rencia de temperatura del motor y su entorno.
En el caso del rotor, depende de la diferencia
entre el rotor y su carcasa, que en este caso
es su entorno. Son dos: Resistencia térmica
de la carcasa al ambiente y Resistencia tér-
mica del bobinado a la carcasa.
La suma de esas dos resistencias térmicas
define la máxima pérdida de potencia admisi-
ble (transformada en calor).
La primera, la resistencia térmica de la carca-
sa al ambiente tiene gran influencia en perio-
dos de funcionamiento largos, o funcionamien-
to en continuo, superiores a la constante tér-
mica de tiempo del motor. Aunque parezca evi-
dente, recordemos que sólo cuando la carca-
sa se empieza a alcanzar temperatura es
cuando empieza a emitir calor.
La segunda, la resistencia térmica del rotor o
bobinado a la carcasa, tiene mayor influen-
cia a corto plazo: el rotor se calienta mucho
más rápido que la carcasa.
www.BRUSHLESSMOTOR.ES
Tutorial motor DC

Constantes Térmicas
símbolo: th1, th2
unidad:
s (segundos)
3. Modo de funcionamiento: Situaciones extre-
mas de parada/arranque y cambio de sentido
de giro tienen un efecto de reducción de la
vida del motor.
4. Influencias del entorno: Temperatura, hume-
dad, vibración, tipo de instalación, etc.
5. En ocasiones, se deben montar unos micro
condensadores asociados a cada delga del
colector. Estos condensadores absorben parte
de la chispa y prolongan la vida útil del motor,
especialmente bajo grandes cargas, mante-
niendo todas las ventajas del sistema de esco-
billas y colector de metal precioso.
6. Las escobillas de grafito junto con los roda-
mientos a bolas también aseguran larga vida,
incluso en condiciones extremadamente rigu-
rosas.
Vida útil o en servicio de los motores brus-
hless DC
La vida del motor está virtualmente limitada al
desgaste normal de los rodamientos. Por esta
razón y debido al uso de componentes elec-
trónicos industriales, los motores DC sin esco-
billas alcanzan una vida de varias decenas de
miles de horas.
33
Constante térmica del bobinado Th1
Es el tiempo requerido por el bobinado para
alcanzar el 63% de la temperatura final. Los
valores típicos van desde algunos segundos
para los motores pequeños, hasta minutos
para motores más grandes. Cuanto mayor es
el valor de esta constante, más tarda el bobi-
nado en calentarse para un mismo valor de
corriente.
Constante térmica del estator Th2
Es el tiempo requerido por el estator para
alcanzar el 63% de la temperatura final. Los
valores típicos son del orden de algunos minu-
tos en los motores más pequeños, hasta 20
minutos en los más grandes.
Vida útil, vida en servicio de los
motores DC
Debido a la gran cantidad de factores que
influyen en este asunto, no se puede prede-
cir la vida de un motor. El rotor de baja induc-
tancia, que es un tipo de motor de continua
(también llamado rotor hueco o sin hierro),
asegura la máxima vida de la escobilla y del
colector. Se puede conseguir una vida del
motor por encima de las 20.000 horas bajo
condiciones favorables, pero se puede tener
una vida de menos de 100 horas en condi-
ciones extremadamente desfavorables.
Los siguientes factores afectan la vida del
motor:
1. Carga eléctrica: Cuanto más alta sea la
corriente, más grande será el desgaste eléc-
trico. En algunos casos puede ser aconseja-
ble seleccionar un motor más potente.
2. Velocidad: Cuanto más alta sea la veloci-
dad, mayor será el desgaste mecánico y eléc-
trico.
www.BRUSHLESSMOTOR.ES
Tutorial motor DC

Tolerancias
Las tolerancias son causadas por diferencias
en el campo magnético, fuerza y resistencia
del hilo de cobre y en grado menor, por fac-
tores mecánicos. Está demostrado que las
desviaciones de los valores nominales son
menores en el rango de funcionamiento que
en las condiciones extremas de arranque y
funcionamiento en vacío.
Pérdidas en el hierro
La contribución de las pérdidas en el hierro
(especialmente por las corrientes de Eddy) al
calentamiento del motor empieza a tener rele-
vancia a velocidades a partir de las 5.000 rpm.
La corrientes de Eddy aparecen también en
los imanes permanentes pero no afectan a la
pérdida de potencia a velocidades inferiores a
20.000 rpm. Por lo tanto, cuando se funciona
a elevadas velocidades (más de 20.000 rpm)
es una factor a tener en cuenta. Por esta
razón, la zona de par en continuo es curva.
Pérdidas por Histéresis
La magnetización del hierro del estator en el
campo, en continua inversión del imán del
rotor, sigue un ciclo de histéresis. En cada
inversión del campo magnético, la energía
definida por el ciclo de histéresis se transfor-
ma en calor. Empíricamente, las pérdidas de
potencia resultantes son proporcionales a la
velocidad y a la inducción magnética. Las cua-
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
lidades magnéticas del material dependen del
proceso de fabricación y determinan el factor
de proporcionalidad. Dado que esta pérdida
de potencia por histéresis aumenta linealmen-
te con la velocidad, se podría considerar for-
malmente como una pérdida adicional de par.
Como consecuencia, la velocidad en vacío se
reduce por un valor constante en el diagrama
velocidad-par.
Pérdidas por las corrientes de Eddy
En un conductor, un flujo magnético cambian-
te, induce bucles cerrados de corriente
(corrientes de Eddy), las cuales son amorti-
guadas dada la limitada conductividad del
material. Esto da como resultado, el calenta-
miento del material y, por tanto, más perdidas
de potencia. Se puede demostrar que las pér-
didas por las corrientes de Eddy son propor-
cionales al cuadrado de la velocidad y de la
inducción magnética.
La constante de Eddy se puede reducir en
gran medida escogiendo un material con alta
resistividad eléctrica y mediante una construc-
ción laminada previniendo la formación de
grandes bucles de corriente.
Consecuentemente, el retorno magnético de
los motores brushless está hecho con lámi-
nas de hierro (estructura laminada) .
De manera análoga a las pérdidas por histé-
resis, las pérdidas de potencia por las corrien-
tes de Eddy se pueden expresar como una
pérdida de par dependiente de la velocidad.
Motor de corriente continua de 150
W con reductora planetaria y freno
de seguridad: al faltar la corriente
se acciona el freno, para evitar acci-
dentes.
34

Regulación del motor DC
Electrónicas de control
control de velocidad
control de par
Regulación de velocidad
DC
brushless DC
Tipos de control
bucle abierto
bucle cerrado
velocidad, par, posición
Modos de control
1 cuadrante (1Q)
4 cuadrantes (4Q)
Sensores
encoder
incremental
absoluto
resolución
holguras
efecto Hall
resolvers
tacodinamo
Motor como tacodinamo o generador.
35
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Regulador de velocidad para motores brushless DC.
Controla velocidad y corriente mediante una señal de
control o potenciómetro.
Regulación
de
velocidad
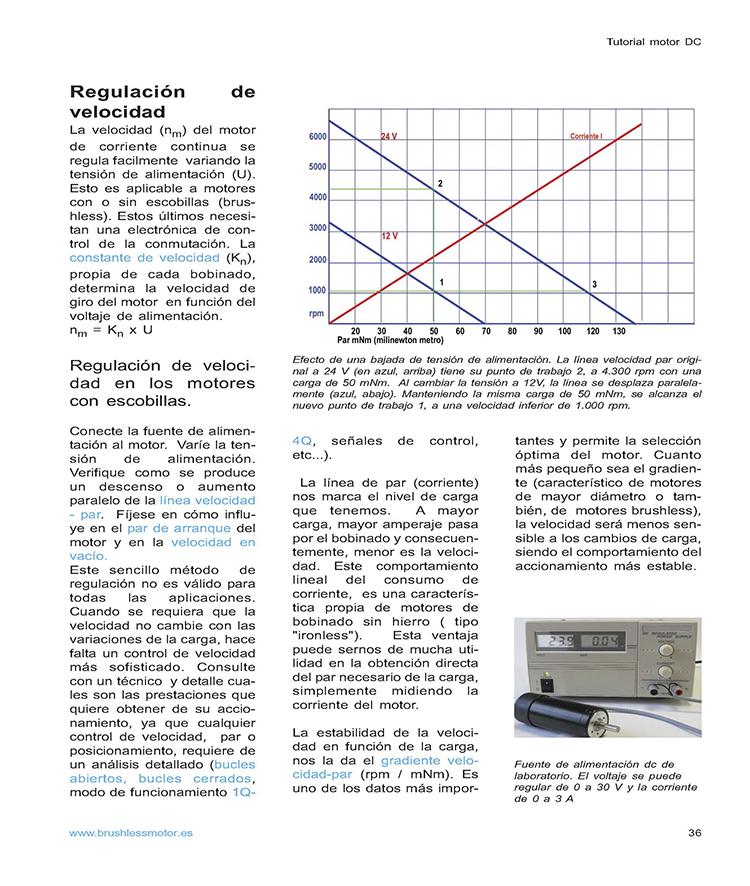
La velocidad (nm) del motor
de corriente continua se
regula facilmente variando la
tensión de alimentación (U).
Esto es aplicable a motores
con o sin escobillas (brus-
hless). Estos últimos necesi-
tan una electrónica de con-
trol de la conmutación. La
constante de velocidad (Kn),
propia de cada bobinado,
determina la velocidad de
giro del motor en función del
voltaje de alimentación.
nm = Kn x U
Regulación de veloci-
dad en los motores
con escobillas.
4Q, señales de control,
etc…).
La línea de par (corriente)
nos marca el nivel de carga
que tenemos. A mayor
carga, mayor amperaje pasa
por el bobinado y consecuen-
temente, menor es la veloci-
dad. Este comportamiento
lineal del consumo de
corriente, es una caracterís-
tica propia de motores de
bobinado sin hierro ( tipo
"ironless"). Esta ventaja
puede sernos de mucha uti-
lidad en la obtención directa
del par necesario de la carga,
simplemente midiendo la
corriente del motor.
La estabilidad de la veloci-
dad en función de la carga,
nos la da el gradiente velo-
cidad-par (rpm / mNm). Es
uno de los datos más impor-
Conecte la fuente de alimen-
tación al motor. Varíe la ten-
sión de alimentación.
Verifique como se produce
un descenso o aumento
paralelo de la línea velocidad
– par. Fíjese en cómo influ-
ye en el par de arranque del
motor y en la velocidad en
vacío.
Este sencillo método de
regulación no es válido para
todas las aplicaciones.
Cuando se requiera que la
velocidad no cambie con las
variaciones de la carga, hace
falta un control de velocidad
más sofisticado. Consulte
con un técnico y detalle cua-
les son las prestaciones que
quiere obtener de su accio-
namiento, ya que cualquier
control de velocidad, par o
posicionamiento, requiere de
un análisis detallado (bucles
abiertos, bucles cerrados,
modo de funcionamiento 1Q-
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
tantes y permite la selección
óptima del motor. Cuanto
más pequeño sea el gradien-
te (característico de motores
de mayor diámetro o tam-
bién, de motores brushless),
la velocidad será menos sen-
sible a los cambios de carga,
siendo el comportamiento del
accionamiento más estable.
Fuente de alimentación dc de
laboratorio. El voltaje se puede
regular de 0 a 30 V y la corriente
de 0 a 3 A
36
Efecto de una bajada de tensión de alimentación. La línea velocidad par origi-
nal a 24 V (en azul, arriba) tiene su punto de trabajo 2, a 4.300 rpm con una
carga de 50 mNm. Al cambiar la tensión a 12V, la linea se desplaza paralela-
mente (azul, abajo). Manteniendo la misma carga de 50 mNm, se alcanza el
nuevo punto de trabajo 1, a una velocidad inferior de 1.000 rpm.

Regulación de veloci-
dad en los motores
brushless DC.
El bobinado del motor de
continua brushless, se basa
en la agrupación de tres
bobinas, colocadas eléctrica-
mente a 120 º para generar
el campo magnético giratorio
del motor. La etapa de con-
trol y potencia difiere total-
mente de un motor de esco-
billas. El motor necesita, obli-
gatoriamente, esta electróni-
ca de control para su funcio-
namiento.
La conmutación secuencial
de estas bobinas se basa en
las señales de la posición del
rotor, generadas por los sen-
sores Hall. Si la conmuta-
ción de estas bobinas se rea-
liza por una electrónica de
conmutación en bloque, se
pueden alcanzar pares más
elevados en el arranque, y si
la conmutación es senoidal,
el funcionamiento del motor
es más suave y el par en fun-
cionamiento en continuo es
mayor.
Tipos de control
El objeto es conseguir un
actuador mecánico que inte-
gre los suficientes elementos
de control para poder modi-
ficar los parámetros de su
actuación mecánica, veloci-
dad, par, posición, etc…..
Estudiando las necesidades
de precisión y ajuste de
nuestra aplicación, debere-
mos seleccionar qué tipo de
control necesitamos: bucle
abierto o bucle cerrado y qué
modo de funcionamiento
debe tener, uno o cuatro cua-
drantes (1 Q o 4 Q).
Bucle o lazo abierto
Dado que no tenemos un
sensor asociado al motor, no
podemos tener un control
ajustado sobre la carga,
aunque exista una señal de
consigna que marque un
punto de trabajo fijo de velo-
cidad. No tenemos una
medición del resultado en la
salida. Por el contrario, son
sistemas más económicos
que los sistemas de bucle
cerrado, con menos compo-
nentes y menos cableado.
Así, si tenemos por ejemplo
una cinta transportadora
donde la carga oscila, el
motor reducirá / aumentará
su velocidad sin mantener
una velocidad constante
estable. Se pueden alcanzar
caídas de velocidad, impor-
tantes.
37
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Otro ejemplo de pérdida de
control se asocia a los moto-
res de paso a paso, donde
una pérdida de un pulso, no
es compensada ni detectada
por el sistema.
Bucle o lazo cerrado
Dada una señal de consigna,
el sistema reacciona con
rapidez, precisión y fiabilidad
en el control de las siguien-
te variables. El sistema
requiere más cableado, y es
más costoso, pero entrega
unas prestaciones muy supe-
riores en cuanto a la calidad
de la regulación.
En la figura de arriba, esquema de bucle abierto. Abajo, bucle cerrado

Tipos de control (cont.)
Control de Velocidad
Mantenemos una velocidad estable indepen-
diente de la carga, proporcional a una señal
de control (señal de consigna). Ejemplo de
una cinta transportadora con diferentes car-
gas: al aumentar la carga, el sistema detecta
una bajada de velocidad y la compensa inme-
diatamente manteniendo el valor de consigna
o deseado.
Control de Corriente
Entrega en el motor un par proporcional a la
señal de control. Por ejemplo, con un atorni-
llador eléctrico, el control de corriente nos per-
mite controlar la fuerza (par de apriete) con la
que atornillamos.
38
Tutorial motor DC
Control de Posición
Para controlar exactamente una posición dada.
Típico uso en robótica y muchos tipos de
máquinas y equipos de laboratorio. El siste-
ma se autocorrige si la posición medida difie-
re de la posición requerida. Incluso cuando
alcanzamos la posición y el motor está para-
do, si lo tratamos de desplazar manualmente,
el sistema reacciona y vuelve a la posición
requerida.
En aplicaciones dinámicas aconsejamos la
utilización de motores de bobinados sin hierro
( motores ironless ), de muy baja constante
de tiempo mecánica.
Al tener el rotor una inercia muy baja, el motor
reacciona muy bien a las señales del amplifi-
cador. Esto se traduce en un gran dinamismo
tanto en aceleraciones como frenadas.
Servoamplificador de control de velocidad y corriente. Etapa de salida lineal de 2 A. Bucle cerrado por encoder o
tacodinamo.
www.BRUSHLESSMOTOR.ES

SENSORES
ENCODER
El encoder va acoplado al eje
trasero del motor. En algunas
ocasiones se usa un encoder
adicional en la carga para posi-
cionamiento muy preciso evi-
tando las holguras en la trans-
misión entre el motor y la carga.
Normalmente, la señal de sali-
da del encoder es una onda
cuadrada digital tipo TTL (0 V
= 0 y 5 V = 1) la cual se pro-
cesa para la cuenta de pulsos
(velocidad o posicionamiento
de precisión). El desfase de 90º
entre las señales del canal A y
B permite determinar el sentido
de giro del motor. El canal Index
se utiliza para tareas de bús-
queda de cero (home, homing)
en posicionamiento, al iniciar la
máquina.
El encoder con line driver gene-
ra señales complementarias en
cada canal para eliminar posi-
bles interferencias eléctricas
que reciban los cables.
Dependiendo del entorno de las
interferencias eléctricas, se
Tutorial motor DC
pueden transmitir las señales a
más de 30 metros sin cable
apantallado. Hoy día, es el tipo
más utilizado en la industria.
El encoder más usado habitual-
mente es el encoder tipo ópti-
co incremental de 500 pulsos /
vuelta, existiendo otras tecno-
logías como los encoders mag-
néticos. Se recomiendan los
encoders magnéticos en luga-
res donde exista mucha polu-
ción ambiental.
Encoder incremental y
encoder absoluto
Con el encoder incremental, al
inicializarse la máquina, el sis-
tema hace una búsqueda del
cero o Home. A partir de ahí,
se suman o restan los pulsos
del encoder para determinar la
posición del accionamiento. En
caso necesario, se puede utili-
zar un encoder absoluto que
memoriza la posición, incluso
en ausencia de corriente. En
este caso no es necesario
hacer una búsqueda de cero al
encender la máquina.
39
Arriba. Piezas de un encoder ópti-
co incremental de 500 pulsos por
vuelta y tres canales. Observe las
diminutas ranuras del disco que al
girar producen los pulsos.
Pulsos de encoder de tres canales.
señal compatible TTL.
Pulsos de encoder de tres canales.
con salida complementaria o Line
Driver
www.BRUSHLESSMOTOR.ES

40
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
ENCODER (cont.)
Resolución
Un punto importante es elegir la resolución del encoder. En encoders incrementales ópticos para
motores pequeños es difícil conseguir resoluciones por encima de los 1.000 pulsos por vuelta
(ppv). Hay que tener en cuenta la trasmisión. Por ejemplo, en el servomotor con reductora de la
página anterior, con una reducción de 236 a uno, la resolución del encoder de 500 pulsos se ve
multiplicada por la reducción. En este caso, tendríamos una resolución de 118.000 pulsos por
vuelta en el eje de la reductora. Esto se traduce en una precisión de poco más de 5’ (minutos
de arco).
Holguras en la trasmisión
Aunque consigamos una resolución o precisión muy alta, ésta puede ser anulada por la holgura
de la reductora y otros elementos de la transmisión. Por ejemplo, la holgura del sistema puede
ser de 2º. Las holguras son necesarias para el rendimiento y el funcionamiento suave de los
engranajes. Este problema sólo es evidente en tareas de posicionamiento muy preciso, cuando
se invierte el sentido de giro. Es decir, si estamos posicionado en el mismo sentido de giro, no
hay mucho problema de repetibilidad. La holgura se hace evidente solo cuando se invierte el sen-
tido de giro. Como solución a estos casos se puede poner un encoder adicional en la carga, una
reductora de holgura reducida (la holgura cero no existe), minimizar por software el efecto de la
holgura en la inversión de giro o utilizar un motor directo acoplado a la carga.
SENSOR DE EFECTO HALL ( o sonda Hall )
Solo para motores brushless DC. Efecto Hall: Cuando fluye una corriente a través de un sensor
Hall y este se aproxima a un campo magnético perpendicular, entonces se crea un voltaje salien-
te proporcional al producto de la fuerza del campo magnético y de la corriente.
Gracias a este principio, mediante un disco mágnetico acoplado al eje del motor podemos sen-
sar la posición del rotor. Principalmente, estos sensores se usan para que la electrónica pueda
conmutar las tres bobinas del motor de acuerdo a la posición de los polos del imán del rotor. Así
por ejemplo un motor brushless de dos polos con 3 sensores hall (a 120 º), tiene una resolución
en posición de 6 pulsos por vuelta ( 60 º de conmutación). En caso de los motores multipolares
esta resolución aumenta. Ocasionalmente, se pueden accionar los motores brushless sin senso-
res Hall para determinadas aplicaciones muy sencillas, como por ejemplo ventiladores y bombas.
Sin sensores Hall, el problema es que el arranque del motor es un poco brusco. Algunas veces
se utilizan los sensores Hall para aplicaciones de posicionamiento de baja resolución. Si tene-
mos una reductora acoplada al motor esta resolución se multiplica.
RESOLVERS
El resolver tiene una bobina primaria giratoria (rotor) y dos bobinados secundarios desfasados
90º (estator). Una tensión variable del bobinado primario es transmitida a los bobinados secun-
darios generando ondas sen a y cos a. Se utiliza para el control de velocidad y posicionamien-
to, pudiendo transmitir sus señales a largas distancias, pero requieren de un equipo especial del
tratamiento de su señal.
TACODINAMOS
La tacodinamo proporciona una señal analógica de tensión proporcional a la velocidad de rota-
ción del motor. Por ejemplo 0,5 V por cada 1.000 rpm. El sentido de giro se identifica por la pola-
ridad de la tensión que suministra. Es importante en estos equipos la linealidad de su diagra-
ma. La desventaja es que al tener escobillas están sujetas a desgaste. Por este motivo y por la
falta de información de posición, han sido prácticamente sustituidas por el encoder.
Se utiliza para el control de velocidad, pero no para posicionamiento.

Motor DC como tacodinamo o gene-
rador
Cualquier motor DC se puede utilizar como
dinamo o tacodinamo. La capacidad de gene-
rar energía se define como fuerza contraelec-
tromotriz. Es decir, son totalmente reversibles.
Al girar el eje generan una tensión entre sus
bornas proporcional a la velocidad y con una
polaridad equivalente al sentido de giro. Para
saber aproximadamente cuanta tensión puede
generar un motor de corriente continua, pode-
mos mirar a las características del motor: si
un motor a 24 V gira a 6.000 rpm, como taco-
dinamo generará aproximadamente 4 V por
cada 1.000 rpm.
La potencia como generador, se aproxima a
la potencia como motor: un motor de 24 W
generará aproximadamente esa misma poten-
cia. No obstante esto es una aproximación que
sólo se cumple en los motores de corriente
continua de elevada eficiencia. Los motores
de rotor sin hierro, al tener una inercia muy
baja y ausencia de par de retención, ofrecen
muy poca resistencia al giro. Esto los hace
interesantes cuando la fuerza generadora es
débil. Por ejemplo en un anemómetro, sólo un
generador de este tipo será sensible a vien-
tos débiles.
41
Tutorial motor DC
ELECTRÓNICAS DE CONTROL
CONTROL DE VELOCIDAD
La función de la electrónica de control es la
de mantener una velocidad constante ante
cualquier variación de carga. Recomendamos
utilizar un sistema de bucle cerrado por su
estabilidad y precisión.
En la gráfica se muestra que la variación de
carga desde 50 mNm (1) a 120 mNm (3),
generaría un cambio de velocidad desde 1.000
rpm hasta pararse si mantuviéramos la ten-
sión de 12V (sólo puede con 70 mNm a esta
tensión). La electrónica se encarga de com-
pensar esta velocidad automáticamente,
subiendo la tensión a 24V, bajo una señal de
consigna (set value) constante. Mantendrá la
velocidad de 1.000 rpm pero la corriente subi-
rá (I en rojo).
Existen electrónicas que permiten ajustar la
velocidad mediante un control interno ( sin sen-
sor externo), denominado control I X R. El sis-
tema reacciona ajustando el voltaje de salida
y la corriente en el motor. Aplicaremos este
tipo de control en aplicaciones donde el con-
trol de velocidad sea menos preciso y esta-
ble.
www.BRUSHLESSMOTOR.ES

CONTROL DE PAR
La función de la electrónica de control es la
de fijar un par máximo de trabajo con inde-
pendencia de la velocidad. Un ejemplo prac-
tico de este control son los sistemas de ator-
nillado con un par de apriete determinado.
En la gráfica anterior, si queremos mantener
el par constante de 50 mNm, (2) y variar la
velocidad de 4.500 rpm a 1.000 rpm, la elec-
trónica bajaría de 24 V (2) a 12 V (1). En este
caso la corriente no varía porque es función
del par.
MODO DE FUNCIONAMIENTO
Una vez definido el tipo de control (velocidad,
par o posición) en la aplicación a desarrollar,
y el tipo de sensor, nos queda por analizar
cómo necesitamos controlar la carga en los
procesos de aceleraciones y frenadas. El
resultado del control queda reflejado en las
siguientes gráficas:
Tutorial motor DC
Controles de funcionamiento 1 Q, un
cuadrante:
Sólo puede acelerar el motor (velocidad y par
en la misma dirección).
Trabajan sólo en el primer o tercer cuadrante
(ver figura).
No proporcionan un frenado controlado.
Usan la fricción para el frenado y la decele-
ración.
Controles de funcionamiento 4 Q,
cuatro cuadrantes:
Acelera y frena en los dos sentidos de giro.
Necesario en posicionamiento.
Atención, en sistemas con altas inercias, que
generan mucha energía en la frenada. Se
necesita un regulador shunt auxiliar, si no lo
incorpora la fuente de alimentación, para
absorver esta energía sobrante en la frenada.
Reacción muy dinámica a las variaciones de
carga.
www.BRUSHLESSMOTOR.ES
Electrónica de control de velocidad, par y posición para
motores DC y brushless DC.
Cuatro cuadrantes (4Q). Bus CAN, USB, y RS232. 50
V, 5A.
Para motores hasta 250 W.
42

Servomecanismos
43
Definición
Tipos de control: Lazo abierto o cerrado
Cuadrantes de funcionamiento: 1 Q – 4Q
Sistemas de Control de Posición:
Definición los elementos principales
Diagramas de un sistema de control de posición
Calidad de los sistemas de control de posición
Controladores PID: Autotuning
Control de posición punto a punto o con interpolación.
www.BRUSHLESSMOTOR.ES
Tutorial motor DC

Definición de
Servomecanismos
Son sistemas de control por
realimentación en los cuales
la variable controlada es una
posición mecánica. Ésta es
la definición recomendada
por el Feedback Control
Commitee of the American
Institute of Electrical
Engineers. Posteriormente,
el concepto se ha generali-
zado, por lo que hoy se iden-
tifica con servosistema, a
todo sistema encargado de
transmitir una orden o infor-
mación de un punto a otro.
Se comparan los resultados
obtenidos en el extremo
receptor, con los que se
desean obtener. Se deduce
de esta comparación una
señal correctora, que introdu-
cida automáticamente en el
sistema, modifique los resul-
tados para conseguir el valor
deseado. Entonces, la varia-
ble controlada ya no tiene por
qué ser una posición mecá-
nica, pudiendo tratarse de
cualquier otra magnitud físi-
ca.
Un ejemplo aclaratorio puede
ser el siguiente: un conduc-
tor circula por una carretera
conduciendo su coche y
transmitiendo a las ruedas,
mediante sus músculos y los
mecanismos de dirección, la
información (dirección a
seguir). Simultáneamente su
mente compara los resulta-
dos que obtiene (dirección
real que sigue el coche) con
los que quisiera obtener
(dirección ideal). De esta
comparación surge una señal
correctora que, actuando
sobre sus músculos y éstos
a su vez sobre el volante,
www.BRUSHLESSMOTOR.ES
Mente del conductor
corrige la dirección siempre
que no coincida la real con
la ideal. Como no acciona el
volante mientras no exista
desviación de la dirección
ideal, en este caso la señal
correctora coincide con el
error cometido.
Tipos de control: Lazo
abierto – Lazo cerrado
La tarea principal de un sis-
tema de control retroalimen-
tado consiste en mantener la
salida en el valor deseado a
pesar de las perturbaciones.
Un sistema de control de
movimiento ha de garantizar
que la consigna de entrada
se convierta en el movimien-
to deseado. Para ello, el
actuador (motor + amplifica-
dor) convierte una variable
de entrada (señal de control)
en una variable de salida
(movimiento controlado).
Este control puede realizar-
se de dos maneras, control
en lazo abierto o control en
lazo cerrado.
Estudiando las necesidades
de precisión y ajuste de
nuestra aplicación, debere-
mos seleccionar qué tipo de
control necesitamos; bucle
Tutorial motor DC
Brazos del conductor
volante
Ojos del conductor
abierto o bucle cerrado y qué
modo de funcionamiento
debe tener, uno o cuatro cua-
drantes (1 Q o 4 Q).
Bucle abierto
Para sistemas muy sencillos.
Dado que no tenemos un
sensor asociado al motor, no
podemos tener un control
ajustado sobre la carga,
aunque exista una señal de
consigna que marque un
punto de trabajo fijo de velo-
cidad. No tenemos una
medición del resultado en la
salida. Por el contrario, son
sistemas más económicos
que los sistemas de bucle
cerrado, con menos compo-
nentes y menos cableado a
cambio de un control relati-
vo. Así, si tenemos por ejem-
plo una cinta transportadora
donde la carga oscila, el
motor reducirá / aumentará
su velocidad sin mantener
una velocidad constante
estable. Se pueden alcanzar
caídas de velocidad, impor-
tantes. Otro ejemplo de pér-
dida de control se asocia a
los motores de paso a paso,
donde una pérdida de un
pulso, no es compensada ni
detectada por el sistema.
44

Bucle cerrado
Altamente recomendable
para tener un control de ver-
dad, tanto sea de velocidad,
de posición o de corriente.
Dada una señal de consigna,
el sistema reacciona con
rapidez, precisión y fiabilidad
en el control de las variables.
El sistema requiere más
cableado: tenemos que
suministrar al control la posi-
ción actual del motor. Hoy
día, el coste de cerrar el lazo
o bucle en un sistema no es
un obstáculo ya que como
contrapartida proporciona
una excelente capacidad de
control.
Usan la fricción para el fre-
nado y la deceleración. La
corriente no puede circular
de manera que contrarreste
la energía cinética del siste-
ma.
Controladores de 4
cuadrantes 4Q:
Controlan la velocidad en
ambos sentidos de giro per-
mitiendo hacer frente a las
variaciones de la carga,
incluso durante la acelera-
ción o el frenado.
Trabajan en todos los cua-
drantes.
Permiten reducir la velocidad
de manera activa en los dos
sentidos de giro. Es decir,
permiten aplicar un par de
frenado o de aceleración
independientemente del sen-
tido de giro.
Reaccionan rápidamente a
cualquier variación en la
Cuadrantes de funcio-
namiento 1Q-4Q
Dependiendo de la compleji-
dad y de las prestaciones de
los amplificadores, éstos
pueden ser clasificados en
dos tipos, controladores de 1
cuadrante y controladores de
4 cuadrantes.
En la siguiente figura se
muestran los distintos cua-
drantes de funcionamiento
en los que se puede hacer
trabajar a un motor.
Controladores de 1
cuadrante 1Q
Sólo pueden acelerar al
motor (velocidad y par en la
misma dirección).
Trabajan solo en el primer o
tercer cuadrante (ver figura).
No proporcionan un frenado
controlado.
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Arriba, bucle abierto. Abajo bucle o lazo cerrado
señal de control. Son impres-
cindibles para los sistemas
de control de posición.o
Cuatro cuadrantes: aceleración y fre-
nado en los dos sentidos de giro
45

Sistemas de control de posición
La principal misión de un sistema de control de posición es la de mover una carga de manera
controlada con la precisión requerida.
Elementos principales
En la figura anterior se muestran los elementos principales de un sistema de control de posi-
ción.
Elemento supervisor o Master
Es responsable del control y la coordinación de todo el sistema completo. El master envía los
comandos de posición al controlador de movimiento, el cual ejecuta y controla los movimientos
del motor. Ejemplos típicos de elementos supervisores son los Autómatas programables, PC´s,
PC´s industriales, Microcontroladores, etc…
Controlador de movimiento
El controlador de movimiento ejecuta las consignas de posición como una unidad esclava. El con-
trolador compara los valores reales del sistema (corriente, velocidad de giro, posición) con las
señales de control y las corrige hasta eliminar cualquier desviación.
El controlador de movimiento es la unidad central de todo el sistema, y debe ser capaz de pro-
cesar las señales que recibe del Master, de los motores y de los sensores; el amplificador reci-
be las señales del circuito de control que, una vez amplificadas son transmitidas al motor. El
amplificador ha de ser compatible con el tipo de motor utilizado: por ejemplo con los motores
brushless tiene que ser capaz de realizar la conmutación electrónica del motor.
46
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Carga
Transmisión
Reductora
Interruptor de home o fin de carrera
Master o sistema supervisor:
Ordenador
Microprocesador
Autómata
BUS de comunicación;
Red de sincronización con
otros servomotores u
otros dispositivos
Servoamplificador
Control de movimiento
Encoder

Reductores, transmisiones mecánicas
Los micromotores suelen girar a altas veloci-
dades, son ideales para girar a velocidades
por encima de 1.000 rpm. Sin embargo, en
muchas aplicaciones se requieren velocidades
más bajas y alto par. En estos casos, se sue-
len utilizar reductores que aumentan el par del
motor y disminuyen la velocidad. Existen
muchos tipos de reductores (planetarios, de
engranaje recto, husillo corona, etc…)
También se utilizan otros tipos de sistemas
mecánicos como piñones, poleas, husillos, cin-
tas transportadoras, etc… Todos estos siste-
mas también han de ser movidos por el motor,
son parte de la carga a mover, incluyendo su
fricción, inercia, elasticidad, holgura…
Fuentes de alimentación
Los motores DC y los motores brushless
requieren un voltaje DC de fuentes de alimen-
tación comerciales, ú obtenido al rectificar y
filtrar una corriente alterna. También es posi-
ble utilizar baterías, paneles solares, etc…
47
Sensores, realimentación
Los sensores miden la velocidad y posición
real del motor. En algunos casos, sin embar-
go, los sensores están acoplados directamen-
te a la carga. Los tipos de sensores más comu-
nes son los encoders incrementales, encoders
absolutos, resolvers…
Motor
El motor es el elemento que transforma la
potencia eléctrica (corriente y voltaje) en
potencia mecánica (par y velocidad). En poten-
cias inferiores a 500 W, los motores más usa-
dos son los motores de continua (con y sin
escobillas; de rotor sin hierro y rotor conven-
cional), también son utilizados, aunque en
menor medida, los motores paso a paso. En
algunos casos aislados se pueden utilizar
motores síncronos y asíncronos.
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Módulo miniatura de control de posición. Características Técnicas: Voltaje: 12 a 36 V, Corriente: 2 A.
Control de corriente: 10.000 / seg., Control de posición : 1.000 / seg. Para motores: brushless y DC con encoder.
Bus: Can, USB y RS232. Control: velocidad, corriente y posición.

48
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Carga
Como decíamos anteriormente, todo el sistema
se diseña para mover la carga de manera con-
trolada y como requiera cada aplicación.Algunos
factores que caracterizan la carga:
– La máxima velocidad de giro (o velocidad line-
al en sistemas lineales) a menudo determina si
se deben utilizar reductoras, o algún otro tipo de
transmisión mecánica.
– La fricción, gravedad y aceleración de las
masas, determinan los pares de trabajo y por
tanto, la potencia, tamaño del motor y amplificador.
– La precisión del posicionamiento determina el tipo de sensor y la resolución del mismo.
Diagrama de un sistema de control de posición
En el diagrama de arriba se muestra un sistema de control de posición con un controlador de
corriente. El generador de trayectorias procesa las consignas de posición y calcula la posiciones
intermedias de la trayectoria para alcanzar la posición final. Estos valores de control son trans-
mitidos periódicamente al controlador de posición el cual, mediante la comparación con la posi-
ción real, determina los valores de comando del control de corriente. Finalmente, el controlador
de corriente, a través de la etapa de potencia, regula la corriente del motor el cual genera la
reacción mecánica del sistema.
Calidad de los sistemas de control de posición.
La calidad de un sistema de control de movimiento viene determinada por la acción coordinada
de todos los elementos que lo forman. Existen ciertos factores como por ejemplo resolución, pre-
cisión y repetibilidad, que son primordiales a la hora de determinar la calidad de un servosiste-
ma. Además de los anteriormente señalados, en algunos sistemas se ha de tener en cuenta la
precisión absoluta, precisión dinámica, linealidad entre consigna y valor real, estabilidad, etc…
Algunos consejos a la hora de diseñar un servosistema son:
1.- Como regla práctica, la resolución del instrumento de medida (encoder) ha de ser al menos
4 veces mayor que la resolución requerida.
2.- En sistemas donde se necesite un posicionamiento muy preciso es necesario utilizar un enco-
der con una resolución todavía más elevada.
3.- Para evitar holguras mecánicas cuando el movimiento cambia de sentido de giro pueden uti-
lizarse reductoras de holgura reducida, aunque sus precios son muy elevados.
4.- Una forma de evitar usar estas reductoras tan caras, puede ser utilizar un encoder colocado
directamente en la carga. Otra, posicionar siempre en la misma dirección. Una posibilidad adicio-
nal puede ser que los controladores incluyan un factor de corrección de la holgura mecánica
cuando hacen una corrección del control.
Para conseguir una alta estabilidad y repetibilidad se recomienda el uso de controladores digita-
les en lugar de los analógicos; ya que pueden verse afectados por los cambios de temperatura.
Los comentarios anteriores dejan patente que los componentes individuales de un sistema de
control de posición han de ser considerados colectivamente.
Cada componente contribuye con sus características individuales a la consecución del sistema
de control deseado. Por eso, es tan importante tener en cuenta todos los elementos a la hora
de calcular cada parte de un sistema de control de posición.

Comunicaciones
Un aspecto muy importante de un sistema de
control de posición, es la comunicación entre
el controlador y el mundo exterior.
Es muy importante determinar la forma en la
que el controlador recibe las consignas de
movimiento. También ha de definirse el modo
en el que le son transmitidas las señales exter-
nas (finales de carrera, sensores, etc…).
Si el controlador recibe los comandos de forma
digital vía un Bus de campo, la velocidad de
este bus ha de ser suficiente para alcanzar
los requerimientos del control.
Existen varios buses de comunicación RS232,
USB, Ethernet, CAN…
El interfaz serie (RS232) es fácil de usar, bas-
tante simple pero no es excesivamente rápi-
do. Sólo permite trabajar con un único contro-
lador, y por lo general las consignas pueden
tardar varios milisegundos en transmitirse.
El Bus Can es robusto, se utiliza en los entor-
nos industriales más exigentes. También es un
bus rápido (hasta 1 Mbit/sg), lo que permite
enviar unos 8 comandos de posicionamiento
por milisegundo. Por tanto, es un sistema ideal
para aplicaciones de control multieje (hasta
127 esclavos), o sistemas en los que se
requiera control en tiempo real.
49
Controladores PID
Los controladores de posición se encargan de
que la posición real del motor coincida con la
consigna dada. Para ello, procesan la señal
de error, la amplifican y producen la respues-
ta adecuada en el motor para eliminar la des-
viación.
Estos controladores se basan en un control
PID, que es una combinación de controles pro-
porcionales, integrales y derivados.
Cada uno de estos tres términos influye en
los demás, y es de vital importancia para el
correcto funcionamiento de un sistema de con-
trol de posición. Los coeficientes KP, KI y KD
deben estar bien ajustados. El cálculo manual
de estos parámetros es un proceso bastante
laborioso. La obtención de estos parámetros
mediante un sistema de prueba y error con-
sume mucho tiempo.
Autotuning
Los modernos controladores de posición incor-
poran funciones automáticas de búsqueda de
los parámetros PID (autotuning). El autotuning
permite ajustar perfectamente el controlador al
tipo de motor y carga, en apenas unos segun-
dos. Es decir, se autocalibra para obtener las
prestaciones óptimas del servosistema.
www.BRUSHLESSMOTOR.ES
Tutorial motor DC

Simbolo
i
I
Variable
Reducción
Corriente del motor
Unidades
x a 1
A, mA
IA
I0
IRMS
Icont
JR
JL
kM
kn
M
MB
MH
Mmot
MR
MRMS
Mcont
Mcont,g Max
n
Corriente de arranque A, mA
Corriente en vacío A mA
RMS Corriente media A, mA
Máxima corriente en continuo A, mA
Momento de inercia del rotor kgm2 gcm2
Momento de inercia de la carga kgm2 gcm2
Constante de par Nm/A, mNm/A
Constante de velocidad rpm / V
Par (motor) Nm, mNm
Par de trabajo Nm, mNm
Par de arranque Nm, mNm
Par del motor Nm, mNm
Par de fricción Nm, mNm
Par efectivo (medio) RMS Nm, mNm
Máximo par en continuo Nm, mNm
Par del reductor Nm, mNm
Velocidad rpm
W
nB
nmax
nmax,g Max
nmot
n0
Pel
PJ
Pmech
R
Velocidad de funcionamiento
Máx. velocidad del motor
Velocidad del reductor
Velocidad del motor
Velocidad en vacío
Potencia eléctrica
Pérdidas por efecto Joule
Potencia mecánica
Resistencia en bornes
rpm
rpm
rpm
rpm
rpm
W
W
W
R25
Rth1
Rth2
t
T
Tmax Max.
TU
TW
U
Uind
Umax Max.
Unenn
a Cu
a max
? n /? M
? TW
? t
µ
µ G
µ max
Tm
TS
TW
Resistencia a 25ºC W
Resistencia térmica bobinado/carcasa K / W
Resistencia térmica carcasa / ambiente K / W
Tiempo s
Temperatura ºC
Temperatura del rotor ºC
Temperatura ambiente ºC
Temperatura del rotor ºC
Tensión del motor V
Tensión inducida (FEM) V
Tensión de alimentación V
Tensión nominal V
Coeficiente de resistencia del Cu
Máx. aceleración angular rad / s2
Relación velocidad / par rpm / mNm
Diferencia de temp. bobinado/ambiente K
Tiempo de aceleración s, ms
Rendimiento (motor) %
Rendimiento (reductor) %
Rendimiento máximo %
Constante mecánica de tiempo s, ms
Const. de tiempo térmica del estator s
Const. de tiempo térmica del bobinado s
50
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |