cio-
eje de
salida
rodamiento
a bolas
Buena disipación de calor,
alta capacidad de sobrecarga.
Línea velocidad-par larga-
mente lineal, permitiendo una
excelente regulación.
brida frontal
sensores Hall
estator: bobinado
carcasa
Motor brushless miniatura. Se uti-
liza en bombas portátiles de insu-
lina para enfermos de diabetes.
Estas bombas están alimentadas
por baterías. El motor brushless es
controlado para aplicar la dosis
correcta.
www.BRUSHLESSMOTOR.ES
Elevada eficiencia alcanzan-
do el 90%: Aprovechan la
energía eléctrica, convirtién-
dola en potencia mecánica y
generando menos calor.
Idóneo para aplicaciones ali-
mentadas por baterías, o
donde el consumo sea impor-
tante.
Muy baja constante eléctrica
de tiempo y reducida induc-
tancia, por lo tanto, mínimo
ruido eléctrico, o interferen-
cias eléctricas prácticamente
inexistentes.
Campos de aplicación: entor-
nos explosivos (sin chispas),
salas limpias (sin desgaste) y
cualquier otra aplicación que
requiera velocidades de giro
elevadas y larga vida en ser
vicio.
4

tación debido a altas velocidades (motores de
escobillas) ni sobrecalentamiento del motor,
por elevadas corrientes. No obstante, si la tem-
peratura ambiente está por encima de los
25°C, debe calcularse un nuevo máximo par
en continuo (corriente).
Dentro de este funcionamiento, existe la posi-
bilidad de encontrar movimientos cíclicos ON
– OFF que llevan al accionamiento a este equi-
librio térmico después de realizar muchos mini
ciclos seguidos. Entendemos que la carga
efectiva final alcanza valores de estabilización,
como si se tratara de un funcionamiento en
continuo. El tiempo ON está por debajo de la
constante de tiempo térmica del bobinado.
Rango de funcionamiento intermitente
Un funcionamiento generalmente compuesto
de una sucesión de ciclos iguales, cada uno
de los cuales comprende un tiempo con carga
constante y una pausa. El accionamiento
puede entregar más potencia durante un tiem-
po determinado.
El motor se puede sobrecargar con más
corriente. En este caso, conviene calcular
exactamente la nueva máxima temperatura del
bobinado, para comprobar que la tempera-
tura permanece por debajo de sus límites tér-
micos. El tiempo ON está por encima de la
constante de tiempo térmica del bobinado
www.BRUSHLESSMOTOR.ES
5
Tutorial motor DC
Rangos de funcionamiento del motor
DC.
La parte izquerda del diagrama repre-
senta el rango de funcionamiento en
continuo, 24 h. La parte coloreada de
la derecha es la zona de funciona-
miento intermitente. En azul, la línea
velocidad-par.
En rojo, la línea de
corriente. A medida que crece el par,
las revoluciones disminuyen y la
corriente aumenta, generando a su
vez más calor.
RANGOS DE FUNCIONAMIENTO
Rango de funcionamiento recomendado
Recomendamos trabajar aplicando la tensión
nominal del bobinado del motor, asegurando de
esta forma no sobrepasar la máxima velocidad
permisible. Respecto a la corriente que debe de
pasar por el bobinado, ésta nunca debe sobre-
pasar el valor nominal (máx. corriente en conti-
nuo), a excepción de funcionamientos cíclicos
ON-OFF, o sobrecargas cortas. En este caso,
deben analizarse cuidadosamente las cargas en
función del tiempo. En casos complejos, consul-
te con un técnico cualificado.
La temperatura ambiente de funcionamiento se
establece normalmente en 25° C.
Recordemos que podemos aplicar otras ten-
siones o temperaturas de trabajo distintas,
ajustando los valores nominales del motor.
Rango de funcionamiento en continuo
Se caracteriza por una carga constante duran-
te un cierto tiempo (superior a la constante
térmica del bobinado) donde se alcanza un
equilibrio térmico. La temperatura permanece
constante, igual o por debajo de la máxima
temperatura de funcionamiento permitida.
Este rango está limitado por la máx. veloci-
dad permitida y el máx. par en continuo, o por
la máx. corriente en continuo. Cuando el motor
funciona dentro del rango de funcionamiento
en continuo, no ocurren problemas de conmu-

Tutorial motor DC
www.brushlessmotor.es
6
Engranajes
Grúa
Cremallera
Cinta tansportadora
Seleccione el tipo de trasmisión
Otros
accionamientos
Husillo
Parámetros del accionamiento
Diámetro de las poleas
Eficiencia
Fuerza de transporte
Inercia de la carga
Inercia del husillo de bolas
Inercia de las poleas
Relación de reducción
Par de la carga
Paso del husillo
Velocidad de la carga
Velocidad de transporte
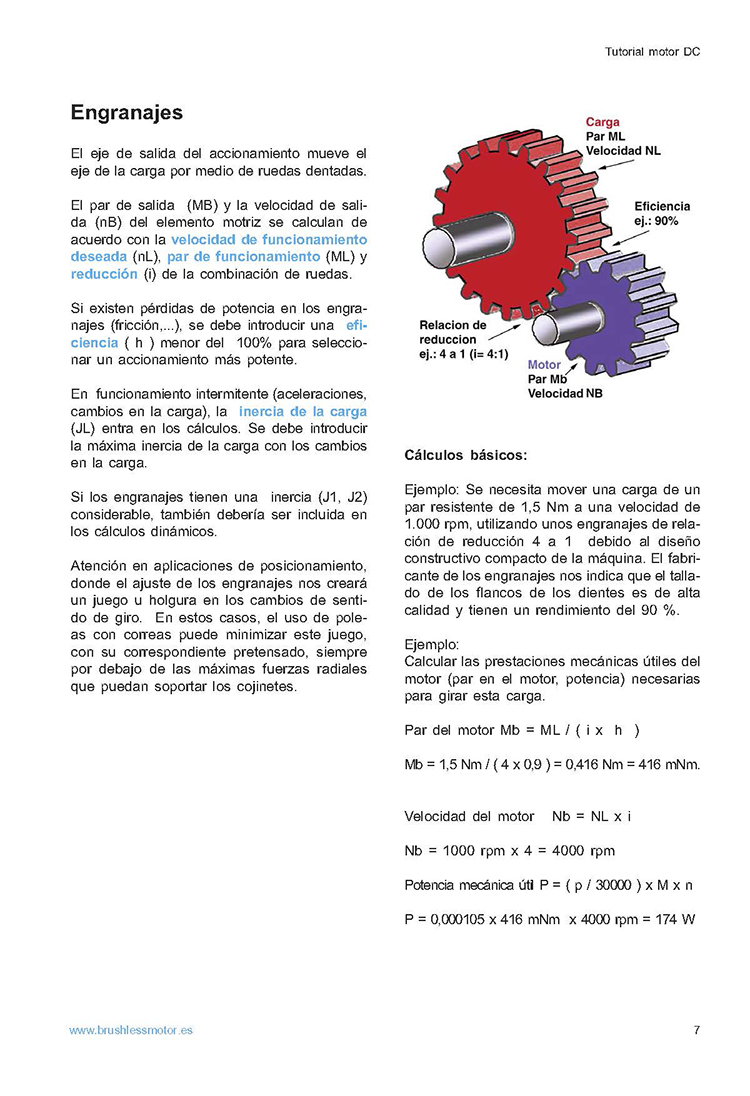
Engranajes
El eje de salida del accionamiento mueve el
eje de la carga por medio de ruedas dentadas.
El par de salida (MB) y la velocidad de sali-
da (nB) del elemento motriz se calculan de
acuerdo con la velocidad de funcionamiento
deseada (nL), par de funcionamiento (ML) y
reducción (i) de la combinación de ruedas.
Si existen pérdidas de potencia en los engra-
najes (fricción,…), se debe introducir una efi-
ciencia ( h ) menor del 100% para seleccio-
nar un accionamiento más potente.
En funcionamiento intermitente (aceleraciones,
cambios en la carga), la inercia de la carga
(JL) entra en los cálculos. Se debe introducir
la máxima inercia de la carga con los cambios
en la carga.
Si los engranajes tienen una inercia (J1, J2)
considerable, también debería ser incluida en
los cálculos dinámicos.
Atención en aplicaciones de posicionamiento,
donde el ajuste de los engranajes nos creará
un juego u holgura en los cambios de senti-
do de giro. En estos casos, el uso de pole-
as con correas puede minimizar este juego,
con su correspondiente pretensado, siempre
por debajo de las máximas fuerzas radiales
que puedan soportar los cojinetes.
Velocidad del motor
Nb = NL x i
Nb = 1000 rpm x 4 = 4000 rpm
Potencia mecánica útil P = ( p / 30000 ) x M x n
P = 0,000105 x 416 mNm x 4000 rpm = 174 W
7
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Cálculos básicos:
Ejemplo: Se necesita mover una carga de un
par resistente de 1,5 Nm a una velocidad de
1.000 rpm, utilizando unos engranajes de rela-
ción de reducción 4 a 1 debido al diseño
constructivo compacto de la máquina. El fabri-
cante de los engranajes nos indica que el talla-
do de los flancos de los dientes es de alta
calidad y tienen un rendimiento del 90 %.
Ejemplo:
Calcular las prestaciones mecánicas útiles del
motor (par en el motor, potencia) necesarias
para girar esta carga.
Par del motor Mb = ML / ( i x h )
Mb = 1,5 Nm / ( 4 x 0,9 ) = 0,416 Nm = 416 mNm.

Cinta transportadora
La carga constante o variable se traslada en una
cinta transportadora.
La fuerza de transporte (FL) y la velocidad de
transporte (vL) se usan junto con el diámetro
(d1) del rodillo tractor para calcular el par de sali-
da (MB) y la velocidad de salida (nB) del ele-
mento motriz.
Si hay pérdidas importantes en la transmisión
(fricción,…), una eficiencia ( µ ) menor del 100%,
este valor se tiene que considerar para seleccio-
nar un accionamiento más potente.
En funcionamiento intermitente (cambios de ace-
leración-deceleración y cambios de carga), la
masa transportada (ML) debe considerarse en
los cálculos. La máxima masa se debe de intro-
ducir con los cambios en la carga.
Si el rodillo tractor y las poleas guía tienen una
inercia considerable (J1, J2), también deberían
incluirse en los cálculos dinámicos.
8
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Cálculos básicos
Ejemplo: Hemos de desplazar una masa de
1 kg en una cinta transportadora, a una
velocidad de 15 m/s. Los rodillos utilizados
tienen un diámetro de 5 cm y nos indica el
fabricante que despúes del pretensado de la
cinta , el rendimiento del sistema es del 95
%.
Calcular las prestaciones mecánicas útiles
(par, velocidad, potencia) del motor necesa-
rias para desplazar esta carga.
Par del motor Mb = ( d1 / 2 ) x ( FL / ? )
Mb = ( 0,05 m / 2) x ( 10 N / 0,95 ) = 0,26 Nm
= 260 mNm
* 1 kg ~ 10 Newtons
Velocidad del motor Nb =( 60 / p ) x ( VL /d1 )
Nb=(60/3,1416)x(15m/s/0,05m)=5.730rpm.
Potencia mecánica útil P = ( p / 30000 ) x M x n
P = 0,000105 x 260 mNm x 5730 rpm =
156,42 W
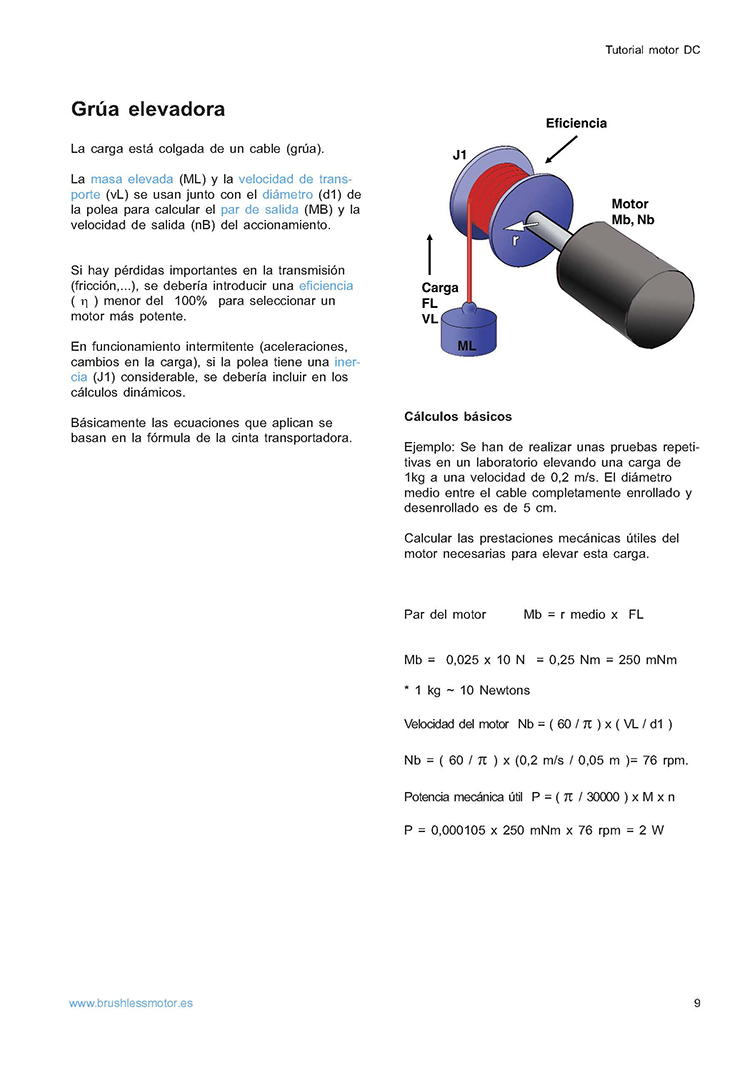
Grúa elevadora
La carga está colgada de un cable (grúa).
La masa elevada (ML) y la velocidad de trans-
porte (vL) se usan junto con el diámetro (d1) de
la polea para calcular el par de salida (MB) y la
velocidad de salida (nB) del accionamiento.
Si hay pérdidas importantes en la transmisión
(fricción,…), se debería introducir una eficiencia
( ? ) menor del 100% para seleccionar un
motor más potente.
En funcionamiento intermitente (aceleraciones,
cambios en la carga), si la polea tiene una iner-
cia (J1) considerable, se debería incluir en los
cálculos dinámicos.
Básicamente las ecuaciones que aplican se
basan en la fórmula de la cinta transportadora.
Par del motor
Mb = r medio x FL
Mb = 0,025 x 10 N = 0,25 Nm = 250 mNm
* 1 kg ~ 10 Newtons
Velocidad del motor Nb = ( 60 /
p ) x ( VL / d1 )
Nb = ( 60 /
p ) x (0,2 m/s / 0,05 m )= 76 rpm.
Potencia mecánica útil P = (
p / 30000 ) x M x n
P = 0,000105 x 250 mNm x 76 rpm = 2 W
9
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Cálculos básicos
Ejemplo: Se han de realizar unas pruebas repeti-
tivas en un laboratorio elevando una carga de
1kg a una velocidad de 0,2 m/s. El diámetro
medio entre el cable completamente enrollado y
desenrollado es de 5 cm.
Calcular las prestaciones mecánicas útiles del
motor necesarias para elevar esta carga.
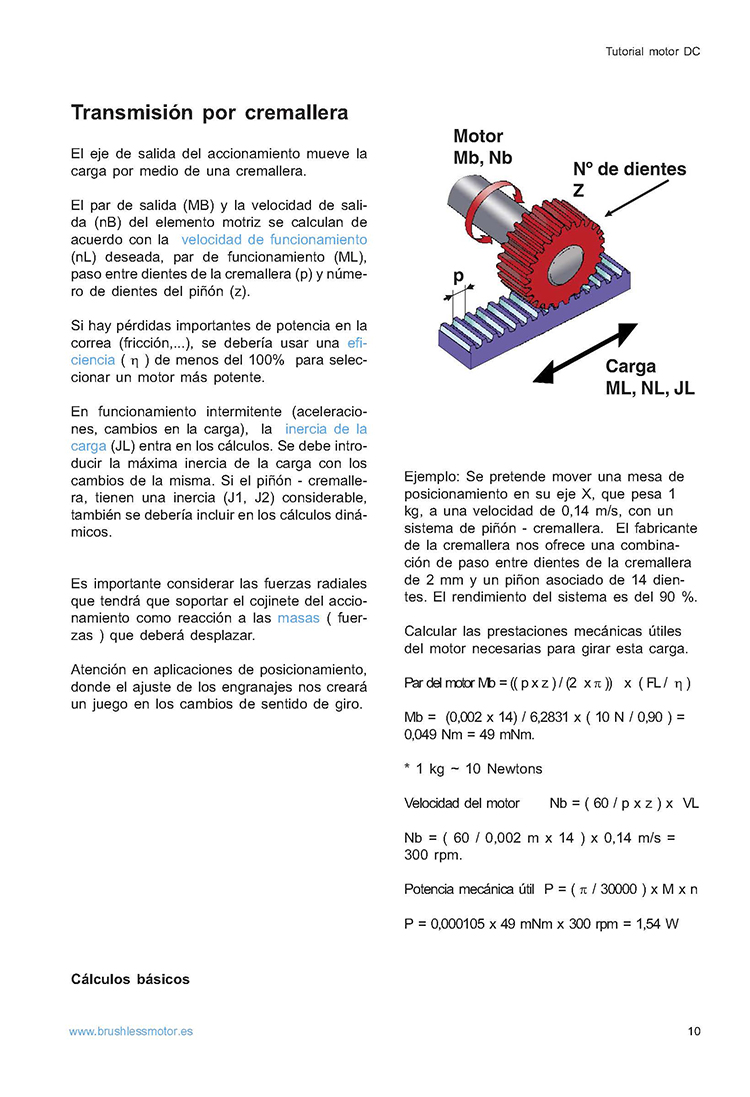
Transmisión por cremallera
El eje de salida del accionamiento mueve la
carga por medio de una cremallera.
El par de salida (MB) y la velocidad de sali-
da (nB) del elemento motriz se calculan de
acuerdo con la velocidad de funcionamiento
(nL) deseada, par de funcionamiento (ML),
paso entre dientes de la cremallera (p) y núme-
ro de dientes del piñón (z).
Si hay pérdidas importantes de potencia en la
correa (fricción,…), se debería usar una efi-
ciencia ( ? ) de menos del 100% para selec-
cionar un motor más potente.
En funcionamiento intermitente (aceleracio-
nes, cambios en la carga), la inercia de la
carga (JL) entra en los cálculos. Se debe intro-
ducir la máxima inercia de la carga con los
cambios de la misma. Si el piñón – cremalle-
ra, tienen una inercia (J1, J2) considerable,
también se debería incluir en los cálculos diná-
micos.
Es importante considerar las fuerzas radiales
que tendrá que soportar el cojinete del accio-
namiento como reacción a las masas ( fuer-
zas ) que deberá desplazar.
Atención en aplicaciones de posicionamiento,
donde el ajuste de los engranajes nos creará
un juego en los cambios de sentido de giro.
Velocidad del motor
Nb = ( 60 / p x z ) x VL
Nb = ( 60 / 0,002 m x 14 ) x 0,14 m/s =
300 rpm.
Potencia mecánica útil P = ( p / 30000 ) x M x n
P = 0,000105 x 49 mNm x 300 rpm = 1,54 W
10
Cálculos básicos
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
Ejemplo: Se pretende mover una mesa de
posicionamiento en su eje X, que pesa 1
kg, a una velocidad de 0,14 m/s, con un
sistema de piñón – cremallera. El fabricante
de la cremallera nos ofrece una combina-
ción de paso entre dientes de la cremallera
de 2 mm y un piñon asociado de 14 dien-
tes. El rendimiento del sistema es del 90 %.
Calcular las prestaciones mecánicas útiles
del motor necesarias para girar esta carga.
PardelmotorMb=((pxz)/(2 xp )) x (FL/ ? )
Mb = (0,002 x 14) / 6,2831 x ( 10 N / 0,90 ) =
0,049 Nm = 49 mNm.
* 1 kg ~ 10 Newtons
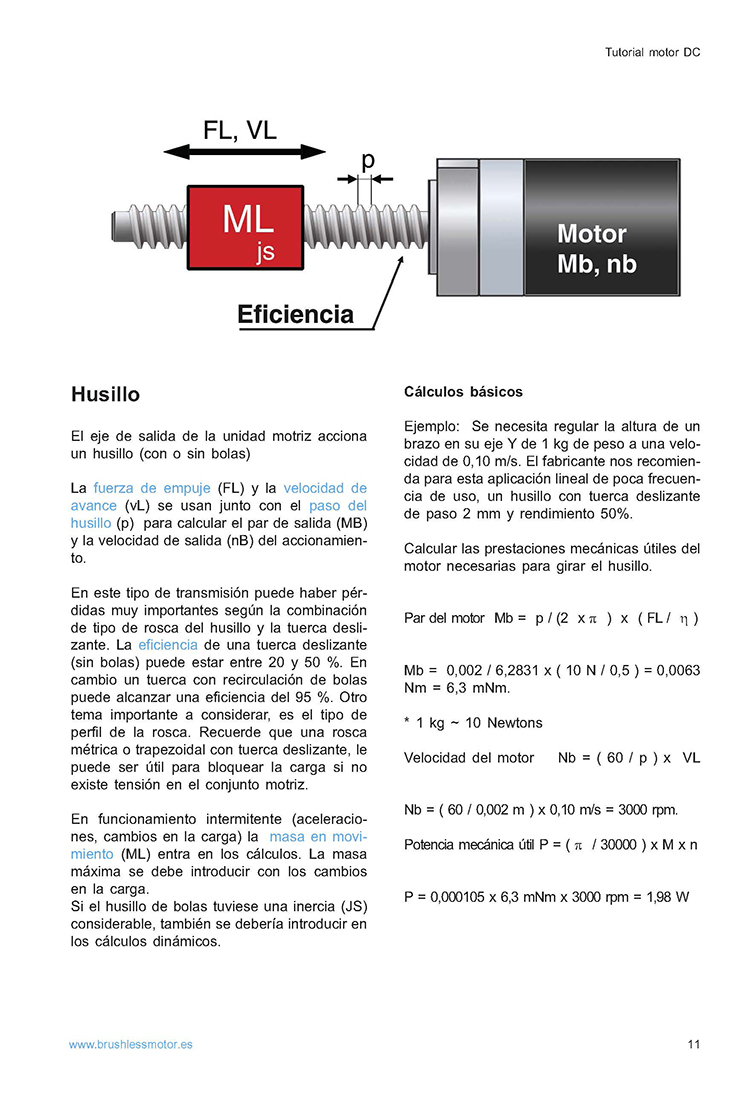
Husillo
El eje de salida de la unidad motriz acciona
un husillo (con o sin bolas)
La fuerza de empuje (FL) y la velocidad de
avance (vL) se usan junto con el paso del
husillo (p) para calcular el par de salida (MB)
y la velocidad de salida (nB) del accionamien-
to.
En este tipo de transmisión puede haber pér-
didas muy importantes según la combinación
de tipo de rosca del husillo y la tuerca desli-
zante. La eficiencia de una tuerca deslizante
(sin bolas) puede estar entre 20 y 50 %. En
cambio un tuerca con recirculación de bolas
puede alcanzar una eficiencia del 95 %. Otro
tema importante a considerar, es el tipo de
perfil de la rosca. Recuerde que una rosca
métrica o trapezoidal con tuerca deslizante, le
puede ser útil para bloquear la carga si no
existe tensión en el conjunto motriz.
Cálculos básicos
Ejemplo: Se necesita regular la altura de un
brazo en su eje Y de 1 kg de peso a una velo-
cidad de 0,10 m/s. El fabricante nos recomien-
da para esta aplicación lineal de poca frecuen-
cia de uso, un husillo con tuerca deslizante
de paso 2 mm y rendimiento 50%.
Calcular las prestaciones mecánicas útiles del
motor necesarias para girar el husillo.
Par del motor Mb = p / (2 x p ) x ( FL / ? )
Mb = 0,002 / 6,2831 x ( 10 N / 0,5 ) = 0,0063
Nm = 6,3 mNm.
* 1 kg ~ 10 Newtons
Velocidad del motor
Nb = ( 60 / p ) x VL
Nb = ( 60 / 0,002 m ) x 0,10 m/s = 3000 rpm.
Potencia mecánica útil P = ( p / 30000 ) x M x n
P = 0,000105 x 6,3 mNm x 3000 rpm = 1,98 W
11
En funcionamiento intermitente (aceleracio-
nes, cambios en la carga) la masa en movi-
miento (ML) entra en los cálculos. La masa
máxima se debe introducir con los cambios
en la carga.
Si el husillo de bolas tuviese una inercia (JS)
considerable, también se debería introducir en
los cálculos dinámicos.
www.BRUSHLESSMOTOR.ES
Tutorial motor DC

Otros tipos de accionamientos
Para otro tipos de aplicaciones no detalladas
en los ejemplos anteriores, la selección del
conjunto motor se calcula de acuerdo con los
datos de la carga (par, velocidad, potencia) y
el voltaje de alimentación.
Par (M), velocidad (n) y potencia mecánica
(Pmec) están relacionadas entre sí por la
ecuación:
Pmec = p / 30 * n * M
Pmec =
p / 30 * 3000 rpm * 2 Nm = 628 W
En funcionamientos intermitentes (donde se
producen aceleraciones y cambios en la
carga), la inercia de la carga (JL) con respec-
to al eje del motor, se debe considerar en los
cálculos. Hay que aplicar la máxima inercia
de la carga y tener en cuenta los tiempos de
su accionamiento. Ver Par de la carga ML
Par de la carga ML
La unidad de par es el Nm (Newton metro).
Es la fuerza constante de rotación cuando se
actúa sobre un brazo de palanca de 1 metro,
colocado en la salida del accionamiento.
Habitualmente en micromotores, el par en con-
tinuo de la carga se expresa en mNm.
(mili Newton metro)
Tabla de conversión:
1 mNm = 0,001 Nm
1 Ncm = 0,01 Nm
1 Nm = 1000 mNm
1 kgcm= 0,0981 Nm
=
=
=
=
0,1 Ncm
10 mNm
100 Ncm
98,07 mNm
El resultado final lo denominamos par efecti-
vo (valor eficaz) RMS. El sumatorio corres-
ponde a cada uno de los pares parciales al
cuadrado por los tiempos de aplicación de
cada par. Dentro de estos cálculos, se han
de tener en cuenta las fuerzas necesarias que
se requieren para mantener velocidades cons-
tantes (par de fricción cinemática).
12
En funcionamientos intermitentes , se calcu-
lan también los pares de aceleración (a) y fre-
nada, con la ayuda de la inercia de la carga
y sus tiempos de aceleración.
ML (acel. o frenada) = JL x a = JL x p /
30 * ( n2 – n1) / ( t2- t1 )
www.BRUSHLESSMOTOR.ES
Tutorial motor DC
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |